KRC4/KRC5 Running¶
drag&bot¶
Startup¶
Prerequisites
- PC Connected to the KUKA Controller Ethernet connection labelled X66 in KRC4 or XF5 in KRC5 micro.
- The PC is the UDP server and the Robot is the client, therefore you should configure the PC IP to be
172.22.10.3unless it's changed in the dnb_rsi.xml file. - The RSI port number should be
49152unless it's changed in the dnb_rsi.xml file. - If you need to change the RSI port number or the RSI Server IP number (PC IP number), then please change it in the dnb_rsi.xml file before uploading it into the controller. More details can be found here
- Go to the Robot System.
- Open the Component-Manager.
- Add the KUKA you want to use.
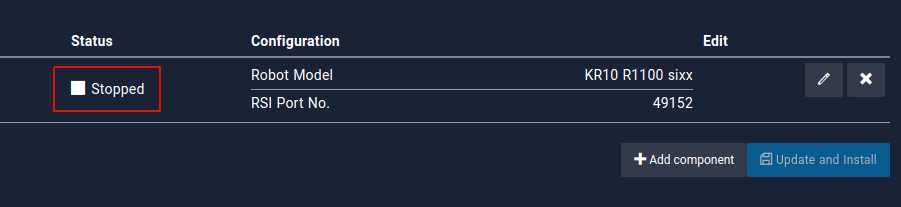
- .
- Once the KRC4/KRC5 component status changed to stop you can proceed with the next steps and start the controller driver.
Robot Controller¶
Startup¶
-
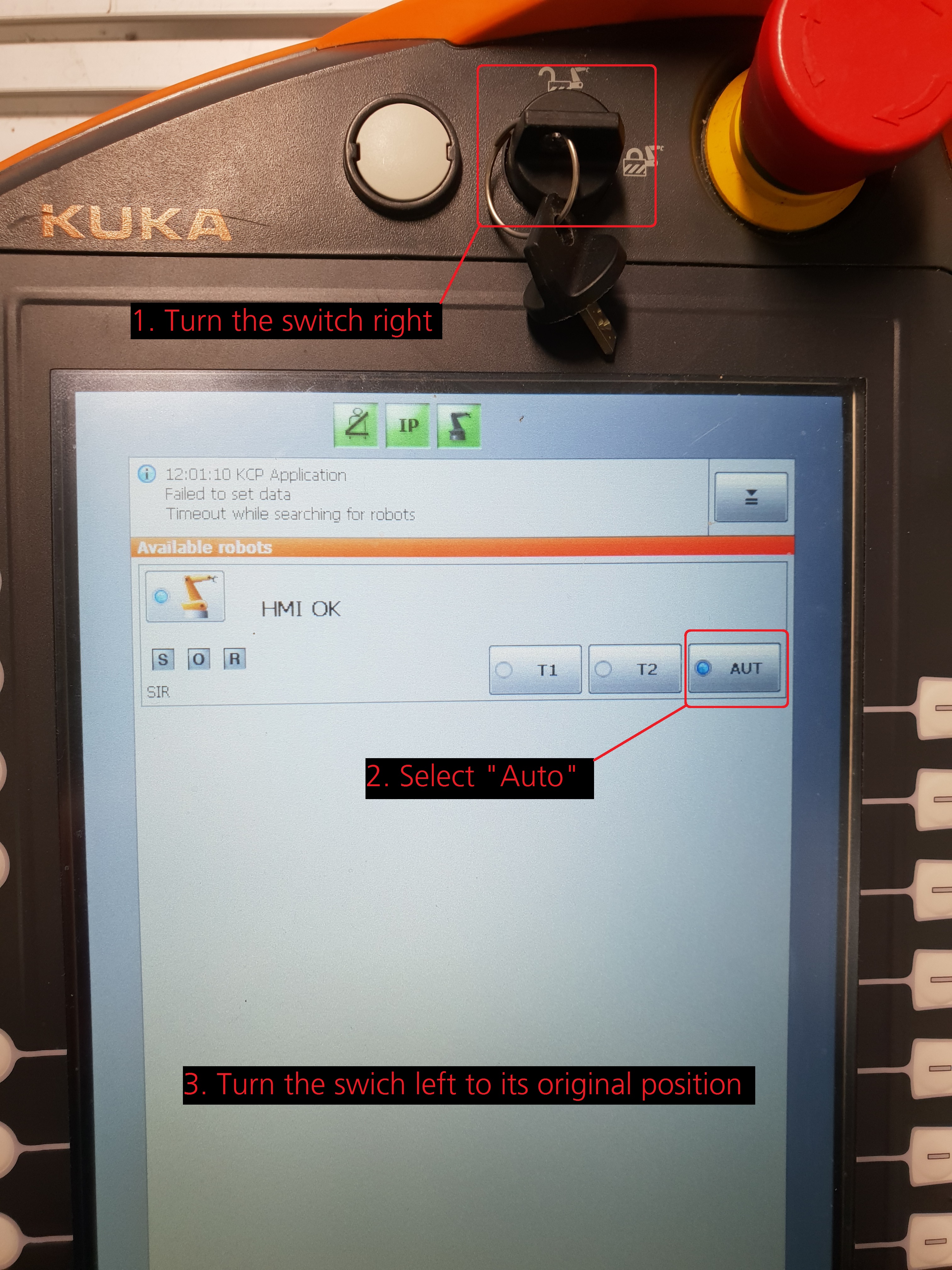
Turn the switch in the top of the KUKA smart HMI into the right side (as shown in the picture), then select „Auto“ and then turn the switch back to the left side (original position).
-
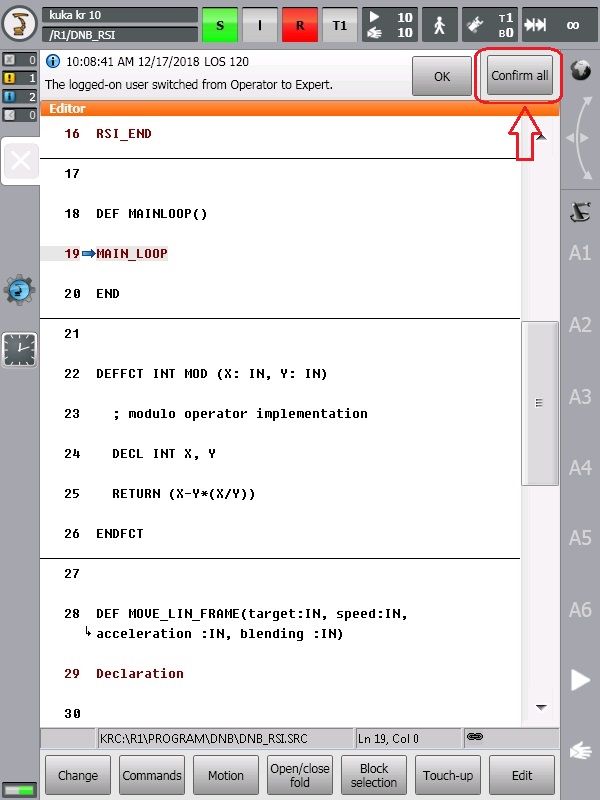
Please confirm all the error messages that shown on the screen.
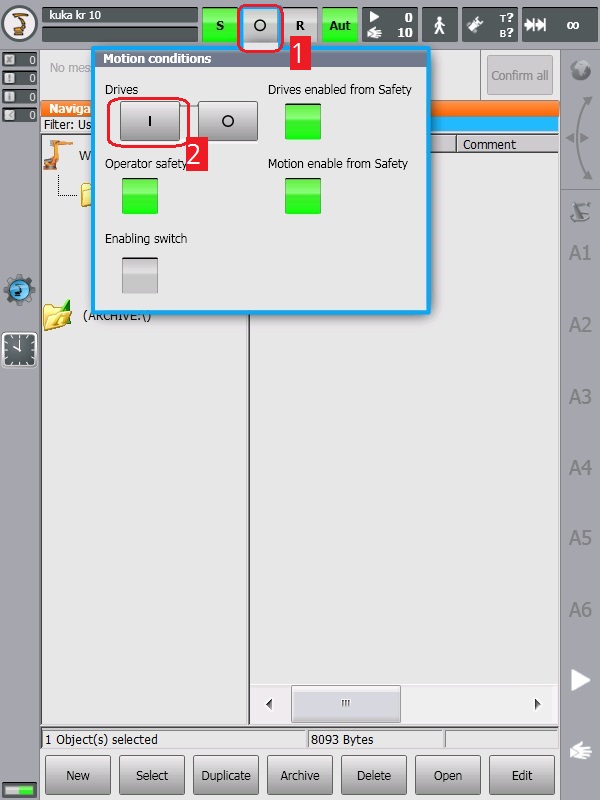
-
Click on the Motion condition icon "O" then activate the Drives by clicking the "I" icon.
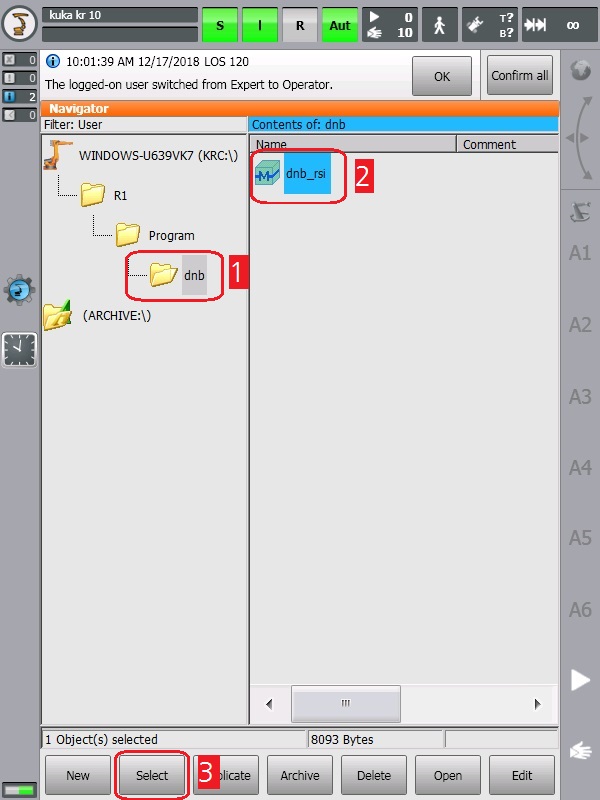
-
Navigate to the Drag and Bot Driver and select the "dnb_rsi" file then click on "Select".
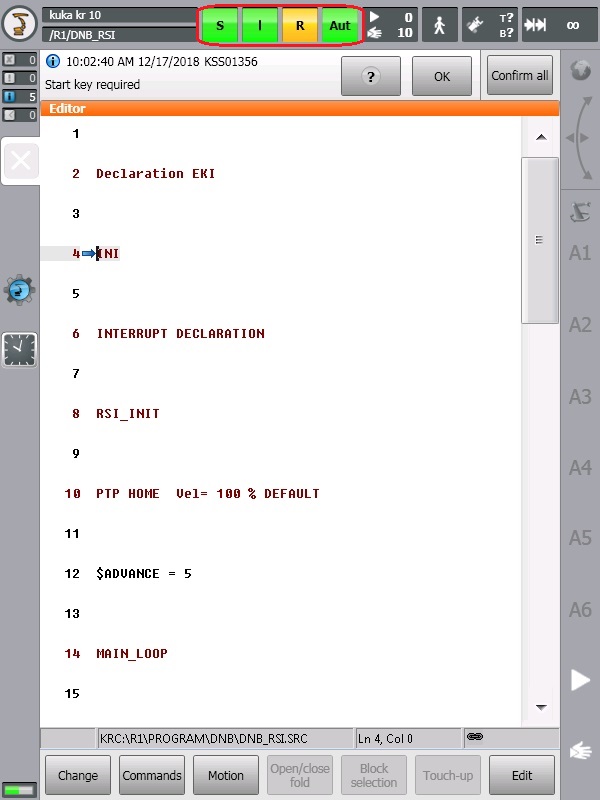
-
Now the "S", "I", and "Aut" should be green . The "R" should be Orange. The Driver is ready to be started now.
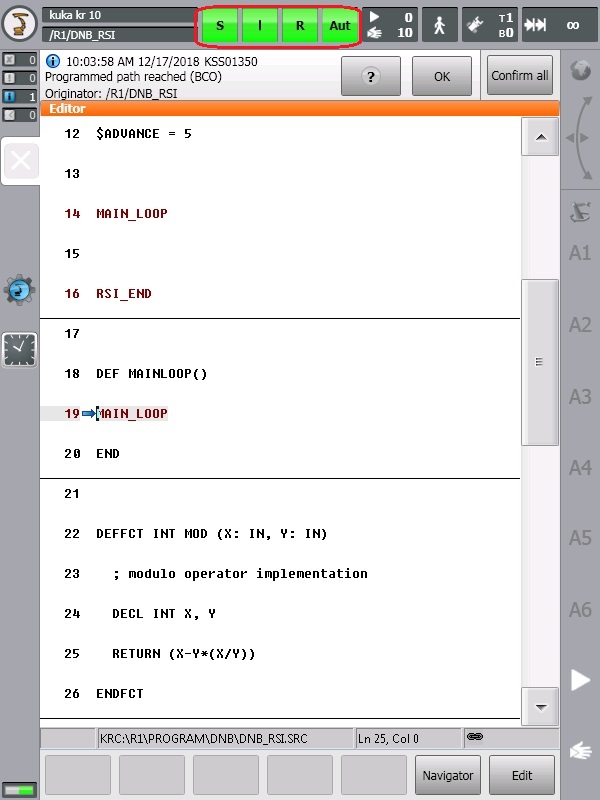
-
Click on the Play button 3-4 times with 1 Sec. intervals.

When the **"R"** icon become _green_, that's mean the driver is running.
Stopping/Restarting¶
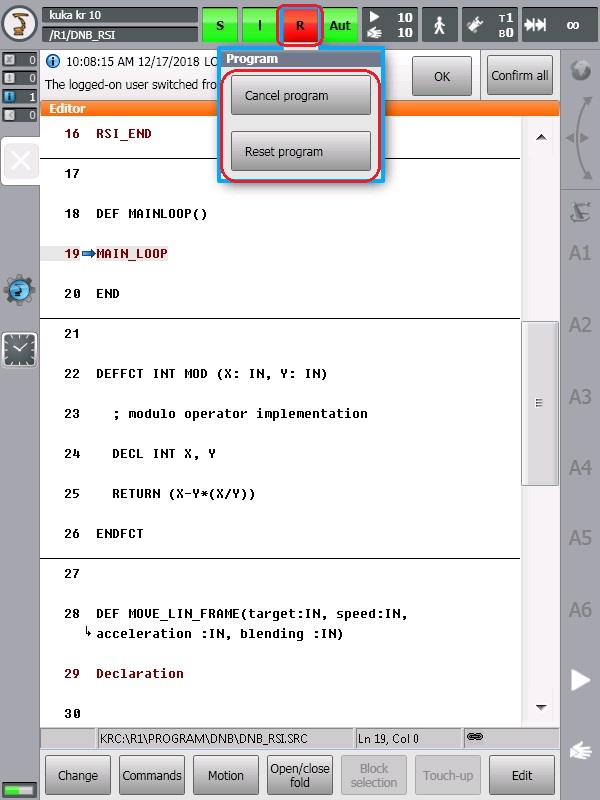
- Click on the Stop button.

Click on the "R" icon then select "Cancel program" to cancel the program or "Reset program" to restart the program (Refer to Para. 3.).