Palletizing im Weihnachtsszenario¶
Im folgenden Kapitel zeigen wir Ihnen, wie Sie ein Palletizing Programm erstellen.
Hier können Sie das Szenario sowie das fertige Programm herunterladen.
(1) Palletizing-Programm erstellen¶
Video Tutorial¶
Schritt-für-Schritt Anleitung¶
- Importieren Sie das bereitgestellte Weihnachtsszenario im Scenario Designer.
- Gehen Sie in "Programme" auf "Funktionsblöcke" und importieren Sie den Funktionsblock "Christmas tree ball position producer" (Sie können den Funktionsblock hier herunterladen).
- Ändern Sie den TCP ihres ausgewählten Greifers (oder erstellen Sie einen neuen TCP) zu Z: 0.22m (alle anderen Koordinaten bleiben auf 0).
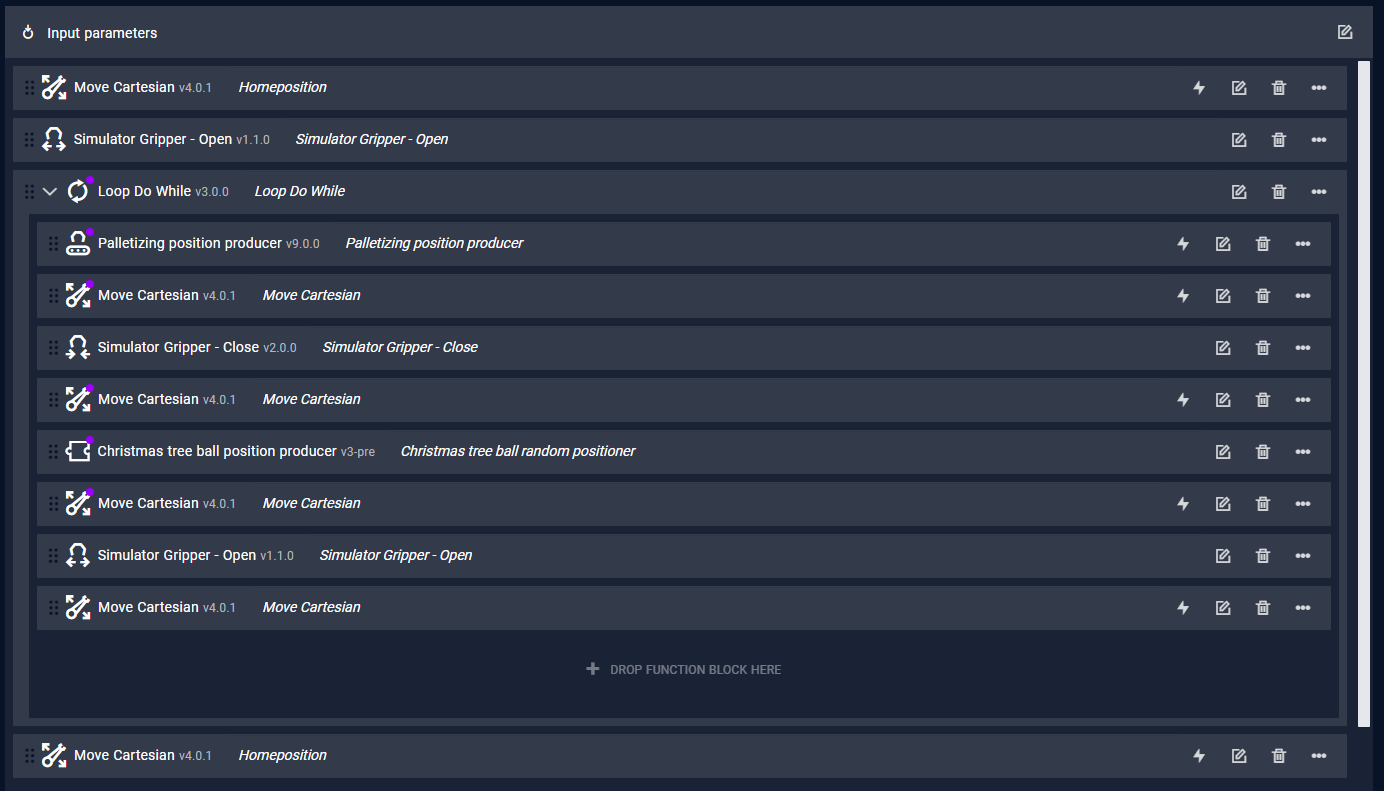
- Gehen Sie in den Bereich "Programme" und erstellen Sie ein neues Programm.
- Ziehen Sie einen
Move CartesianFunktionsblock in das Programm und benennen Sie diesen als "Homeposition". - Fügen Sie nun
Simulator Gripper - OpenundPalletizing position producerzum Programm hinzu. -
Setzen Sie die Parametereinstellungen für den
Palletizing position producerand follow the palletizing wizard.- Wählen Sie das Raster aus
- Setzen Sie das Raster auf 6 Spalten and 4 Reihen
- Legen Sie die Maße fest, indem Sie den Roboter zu den definierten Positionen fahren
- Definieren Sie die zwei Greifpositionen
- Wählen Sie eine Sequenz
-
Ziehen Sie einen weiteren
Move CartesianFunktionsblock in das Programm. - Öffnen Sie die Parametereinstellungen und klicken Sie auf das Verlinkungssymbol rechts neben "Trajectory".
- Verlinken Sie die Trajektorie mit der "Approach trajectory" aus dem Palletizing position producer.
- Speichern Sie die Einstellung.
- Fügen Sie nun einen
Simulator Gripper - CloseundMove CartesianBlock hinzu. - Öffnen Sie die Parameter des Move Cartesian und verlinken Sie die Trajektorie mit der "Retreat trajectory" des Palletizing position producers.
-
Fügen Sie nun den
Christmas tree ball position producerin das Programm und geben Sie - für das bereitgestellte Szenario - folgende Werte in die Parametereinstellungen ein: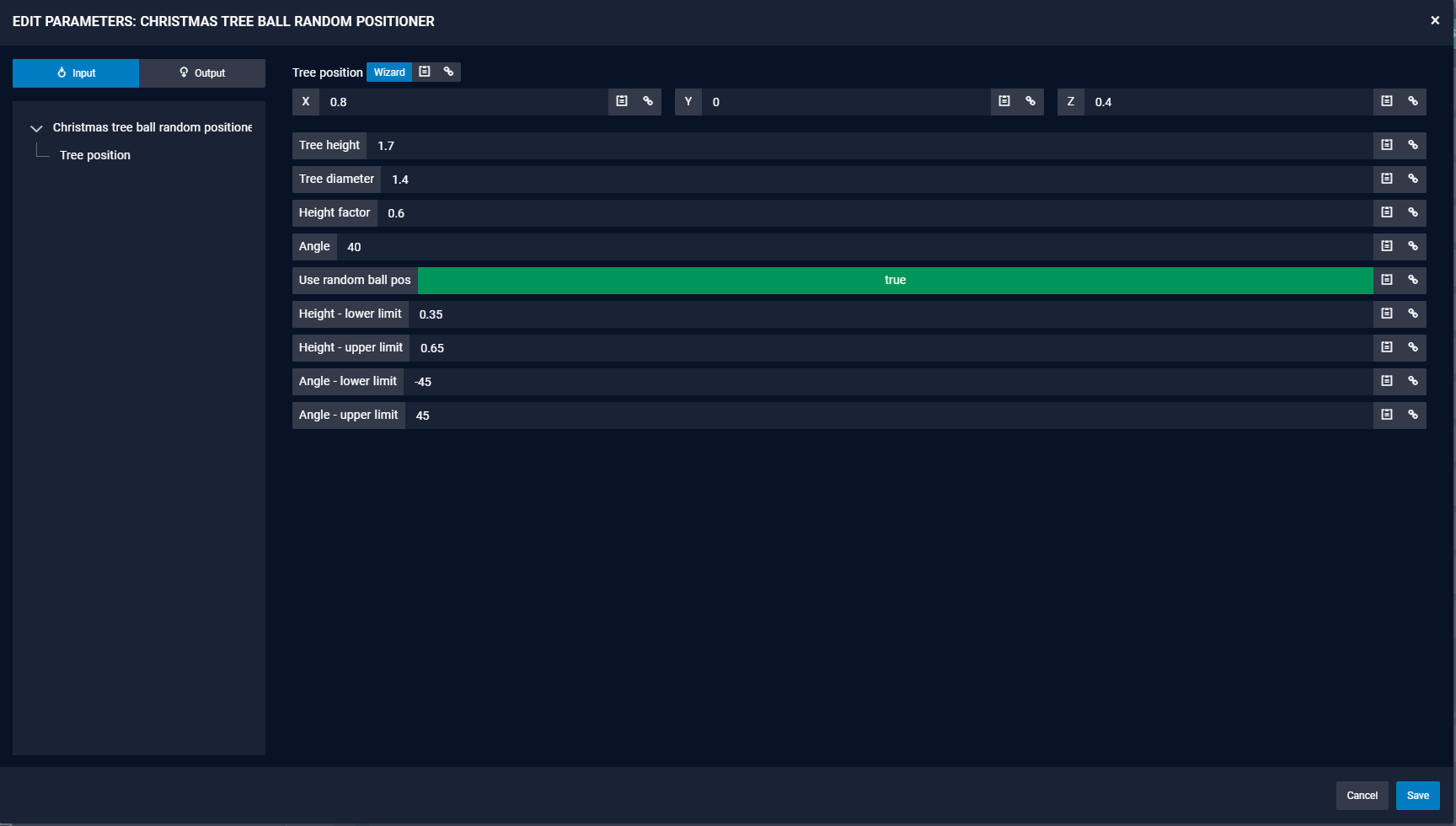
-
Ziehen Sie einen weiteren
Move CartesianFunktionsblock in das Programm. -
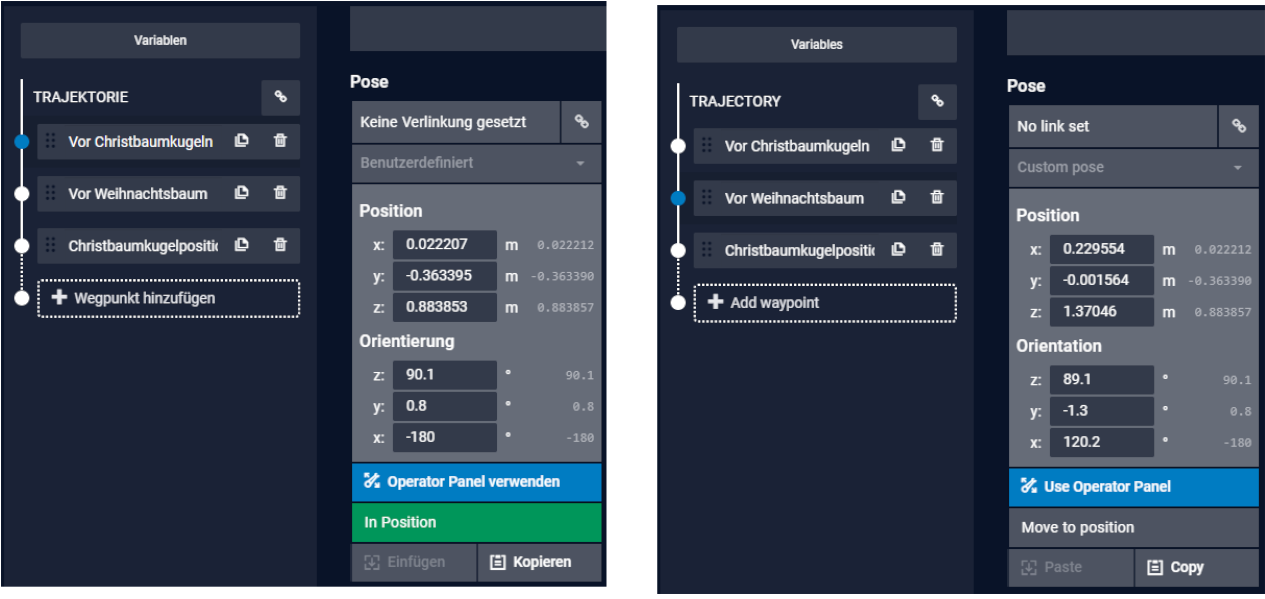
Erstellen Sie einen Wegpunkt vor den Christbaumkugeln und einen vor dem Weihnachtsbaum.
-
Erstellen Sie einen dritten Wegpunkt "Christbaumkugelposition" und verlinken Sie die XYZ Positionen mit den "Christmas tree ball positioner" Positionen:
- Gehen Sie hierzu auf den
Generic parameter editorund klicken Sie im Menü links auf den dritten Wegpunkt - Verlinken Sie die XYZ Koordinaten unter "Position" mit dem "Christmas tree ball positioner"
- Gehen Sie hierzu auf den
-
Fügen Sie den Funktionsblock
Simulator Gripper - Openzum Programm hinzu. - Duplizieren Sie den vorherigen
Move CartesianBlock und löschen Sie darin den letzten Wegpunkt. Tauschen Sie die beiden verbliebenden Wegpunkte. - Ziehen sie nun einen
Loop do WhileFunktionsblock in das Programm und platzieren Sie alle Funktionsblöcke -bis auf die ersten beiden- in den Loop. - Gehen Sie in die Parametereinstellungen des Loop Funktionsblocks und verlinken Sie die Input Parameter mit dem "Palletizing Position Producer".
- Duplizieren Sie den erstene "Homeposition" Funktionsblock und platzieren Sie ihn ans Ende des Programms, außerhalb des Loops.
- Fertig! Sie können nun Ihren Weihnachtsbaum mit dem Roboter schmücken