Pick&Place Programm erstellen¶
Das folgende Kapitel enthält aufeinander aufbauende Varianten eines Pick&Place Programms:
- Pick&Place-Grundprogramm erstellen
- Erweiterung: Roboterbewegungen optimieren
- Erweiterung: Schleife hinzufügen
- Erweiterung: Eingabeparameter hinzufügen
- Erweiterung: Fallunterscheidung und Benutzerdialog hinzufügen
Lernziele
- Greifen und Ablegen von Werkstücken
- Roboterbewegungen parametrieren
- Verwendung von Schleifen und Bedingungen
- Verwendung von Eingabeparametern und Benutzerdialogen
Fehlermeldung bei Programmausführung
Falls einzelne Wegpunkte in den Programmen zu weit voneinander entfernt sind, kann der Roboter die Bewegung nicht mehr ausführen. Es kommt zu einer Fehlermeldung ("Command Error"). Dies kann behoben werden, indem Sie die Abstände zwischen den Wegpunkten verringern oder Zwischenpunkte einfügen.
Pick&Place-Grundprogramm erstellen¶
Video Tutorial¶
Schritt-für-Schritt Anleitung¶
-
Gehen Sie in den Bereich Programme.
-
Klicken Sie auf und benennen Sie zunächst das Programm.
-
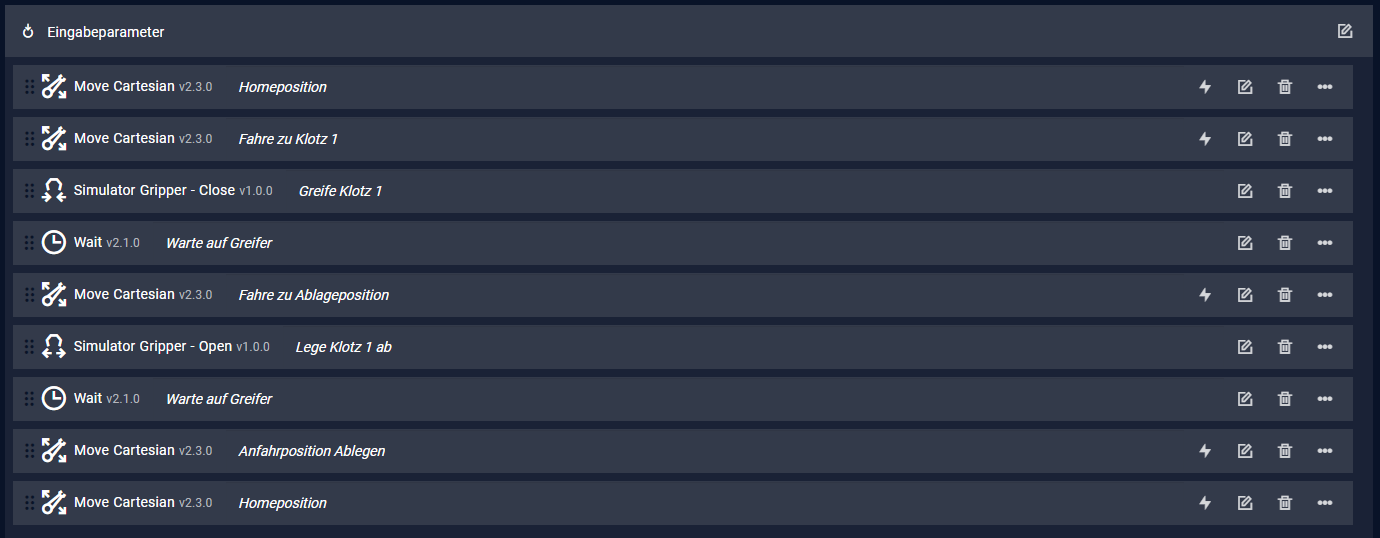
Ziehen Sie einen
Move CartesianFunktionsblock in das Programm und benennen Sie diesen als "Homeposition". -
Parametrisieren Sie in diesem Funktionsblock die gewünschte Ausgangsposition mithilfe des Trajectory Wizards.
-
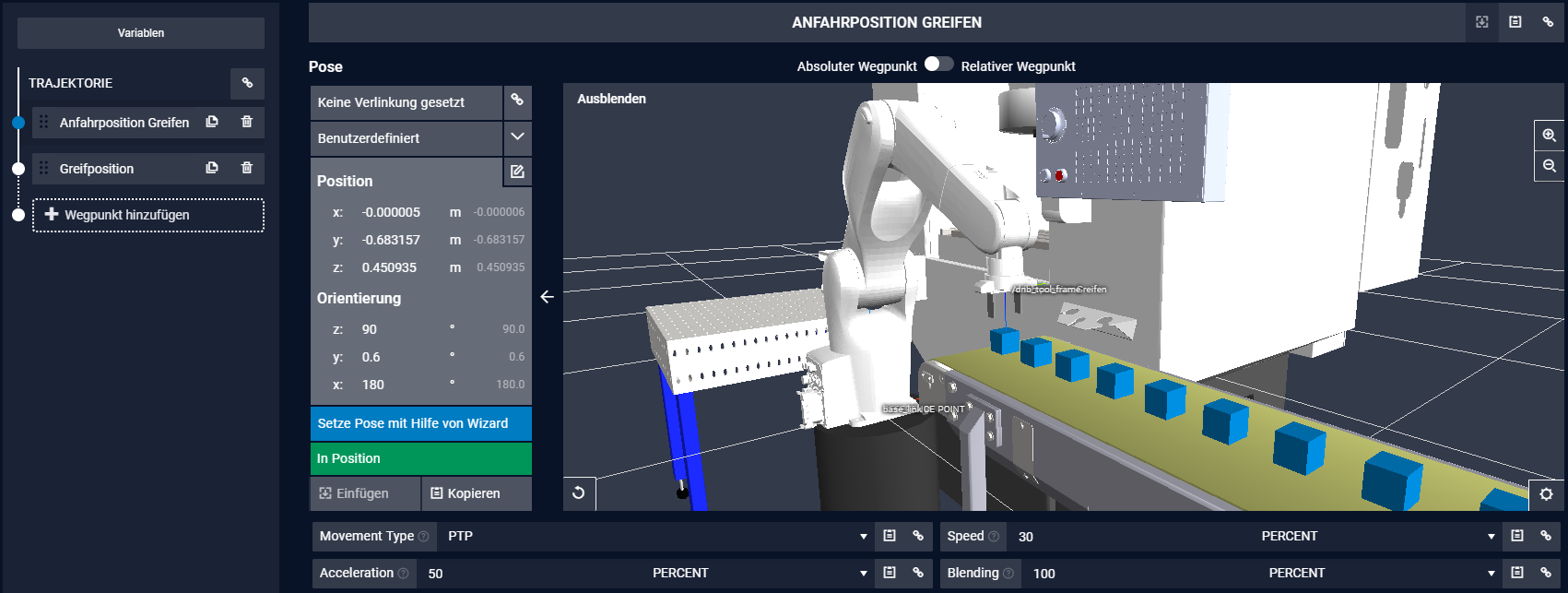
Fügen Sie nun einen weiteren
Move CartesianBlock hinzu und definieren Sie die folgenden beiden Wegpunkte:a) Die Anfahrposition über dem zu greifenden Werkstück.
b) Die Greifposition direkt am Werkstück.
Für die Anfahrposition kann dies z.B folgendermaßen aussehen:
-
Um das Werkstück zu greifen, ziehen Sie nun den Funktionsblock
Simulator Gripper - Closein das Programm. -
Führen Sie das Programm aus, um im nächsten Schritt die Ablageposition mit dem Werkstück bestimmen zu können.
-
Für die Ablageposition: Duplizieren Sie den letzten
Move CartesianBlock und ziehen Sie ihn an das Programmende. -
Parametrieren Sie den Funktionsblock.
-
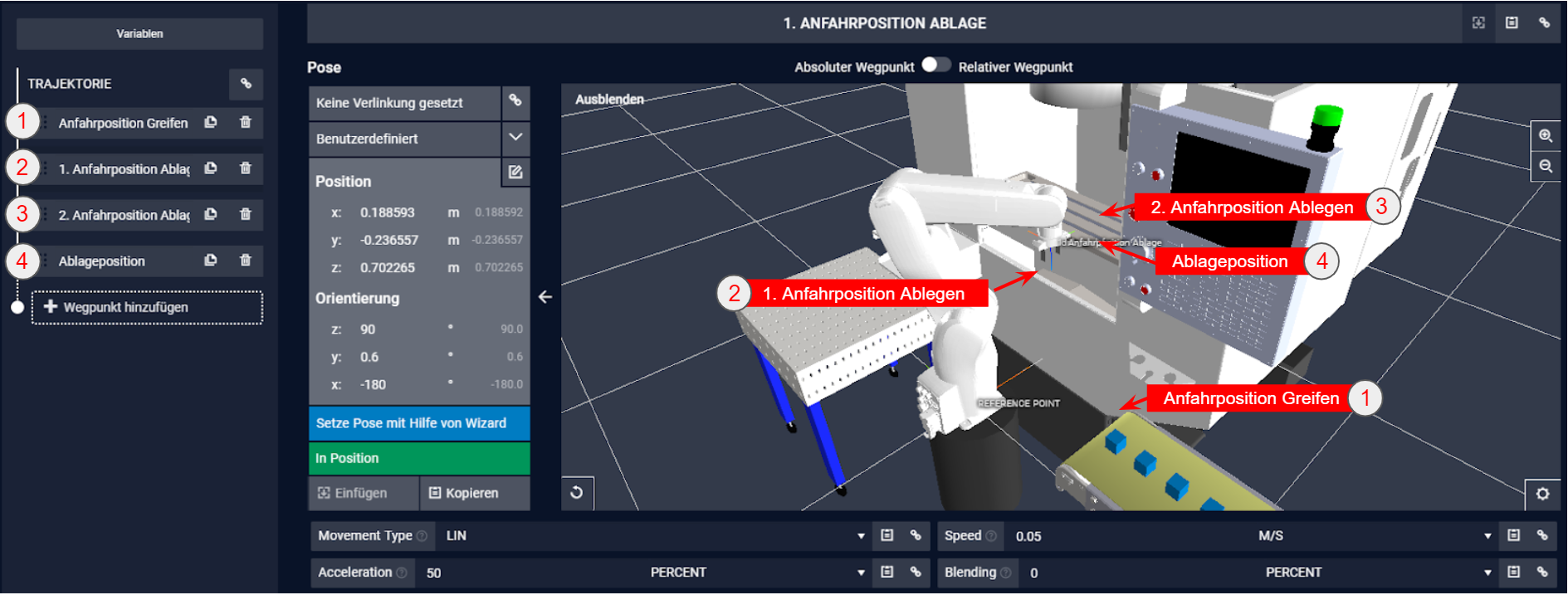
Ersetzen Sie im Trajectory Wizard die Greifposition (2. Wegpunkt) mit dem 1. Anfahrpunkt für die Ablageposition. Dieser muss vor der Maschine liegen.
-
Definieren Sie einen 2. Anfahrpunkt direkt über Ablagepunkt, sowie den Ablagepunkt selbst. Die Parametrisierung sieht des Blocks sieht nun wie folgt aus:
-
Ziehen Sie nun
Simulator Gripper - Openin das Programm. -
Duplizieren Sie den vorherigen
Move CartesianBlock und löschen die vorhandenen Wegpunkte bis auf die Anfahrpositionen. -
Tauschen Sie die beiden Anfahrpositionen um den Roboter aus der Maschine zu fahren.
-
Kopieren Sie nun den Block
Grundstellungaus Schritt 3, sodass der Roboter am Ende wieder dorthin zurückfährt. -
Fertig! Sie haben soeben Ihr erstes Pick&Place Programm erstellt. (Sie können das Programm hier herunterladen. Unter "Programmübersicht" → können Sie externe Programme in drag&bot laden.)
 ¶
¶
Weitere Informationen:¶
Grundstellung
Als Grundstellung bezeichnet man die Anfangs- und die Endposition eines Programms. Diese sollten gleich sein, damit ein Programm nach dem Beenden direkt wieder gestartet werden.