Stäubli CS9 Usage¶
Note
This assumes that setting up the Stäubli CS9 controller for drag&bot has successfully been finished.
Running a Stäubli CS9 robot with drag&bot¶
- Starting drag&bot can be done in remote mode, automatic mode or manual mode.
- Start the CS9 controller.
- If configured for automatic start during setup the drag&bot controller program will start automatically. Otherwise it has to be started manually.
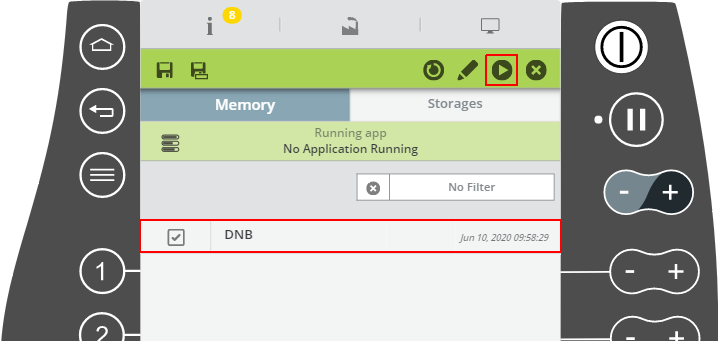
- To start the drag&bot controller program manually switch to VAL3 in the main menu and select the Storages tab.
- Load the DNB application by clicking the name. The view will automatically switch to the Memory tab and select the loaded application.
- Press the
 button on the top right to start the application.
button on the top right to start the application.
- You can watch messages by switching to the outprint view either from the main menu with LOGGER or the
 button on the top bar. Important information is also shown as small popup message on the top left.
button on the top bar. Important information is also shown as small popup message on the top left. - Start drag&bot with the Stäubli CS9 setup. It is now possible to watch the robot from drag&bot.
- Release the emergency buttons at the Stäubli CS9 controller and SP2 teach pendant. Probably you need to restart the safety of the controller on the bottom bar.
- In remote mode
 the controller will automatically power and enable the motors as soon as the driver connects to the controller.
the controller will automatically power and enable the motors as soon as the driver connects to the controller. - In automatic mode
 the controller will power the motors after enabling them with the
the controller will power the motors after enabling them with the  button on the SP2 teach pendant. The button will light up while the motors are powered. To enable moves press the
button on the SP2 teach pendant. The button will light up while the motors are powered. To enable moves press the  button once. A small LED left to it flashes while disabled and lights up steadily while enabled.
button once. A small LED left to it flashes while disabled and lights up steadily while enabled. - In manual mode
 the controller will power the motors after enabling them with the button on the SP2 teach pendant. The button will light up while the motors are powered. To enable moves keep the button and the deadman switch on the back of the SP2 teach pendant pressed. A small LED left to it flashes while disabled and lights up steadily while enabled.
the controller will power the motors after enabling them with the button on the SP2 teach pendant. The button will light up while the motors are powered. To enable moves keep the button and the deadman switch on the back of the SP2 teach pendant pressed. A small LED left to it flashes while disabled and lights up steadily while enabled.
Warning
Note that all movements sent to the controller during not pressing the ![]() button are queued in the background and executed as soon as the button is pressed.
button are queued in the background and executed as soon as the button is pressed.
- Changing between working modes is possible with the working mode selector WMS9 or at the right of the bottom bar.
- The controller will revoke power and disable the motors when changing between working modes or the communication to drag&bot is closed.
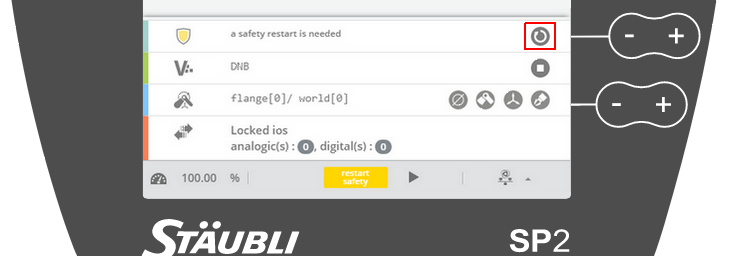
- When changing between working modes it might be necessary to restart the safety. If so its indicated on the bottom bar with
 . To restart the safety either press the blue button at the working mode selector WMS9 or press this label on the screen and in the expanding bottom menu the
. To restart the safety either press the blue button at the working mode selector WMS9 or press this label on the screen and in the expanding bottom menu the  button next to a safety restart is needed.
button next to a safety restart is needed.
Digital Inputs and Outputs¶
The Stäubli CS9 controller provides several Digital I/Os, which are accessible through drag&bot:
| Controller Ports | Type | drag&bot Pin |
|---|---|---|
| Fast Input 1 | Digital Input | FI[1] |
| Fast Input 2 | Digital Input | FI[2] |
| Fast Output 1 | Digital Output | FO[1] |
| Fast Output 2 | Digital Output | FO[2] |
| Valves Safe State | Digital Input | VSS[1] |
| Valve 1 | Digital Output | V[1] |
| Valve 2 | Digital Output | V[2] |
To interact with the Digital I/Os using this numbering in your programs use the function blocks
- Digital I/O Device - Get
- Digital I/O Device - Set
- Digital I/O Device - Wait For
as described in the Function Block Library overview.