Robot Simulator¶
Every drag&bot system can be configured with a robot manufacturer independent robot simulator. The simulator is the best way to learn drag&bot without the need of a physical robot.
Setup¶
You can select the robot simulator as regular robot component in the  Component Manager.
Component Manager.
A robot manufacturer independent robot model is selected by default, but you can choose another robot model in the component configuration.
Info
Please note that changing the robot model just replaces the mesh and the kinematic chain of the robot. The simulation in the background is still the drag&bot simulation and not the simulation from the respective manufacturer of the robot model.
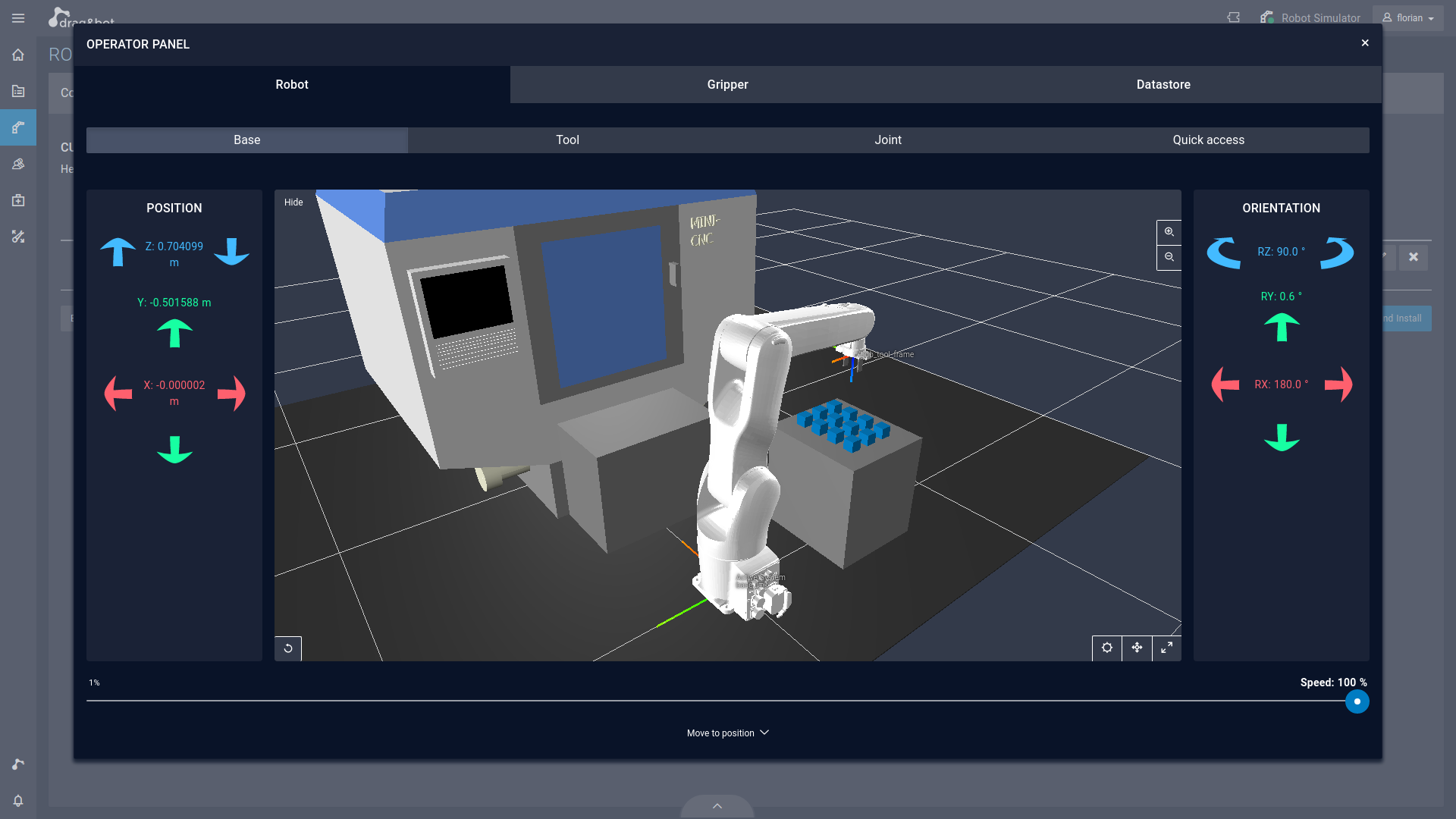
Usage¶
The Robot Simulator can be used like every other robot in drag&bot. It provides a simple built-in gripper and an environment with a machine, two tables and 12 cubic parts. The parts can be gripped with the gripper, if they are within a specific range. Then they are attached to the gripper on closing. They are respectively released on opening of the gripper. The gripper can be activated by function blocks (see below) or from the Gripper tab in the Operators Panel.
Info
Note that there is currently no simulation of gravity in the Robot Simulator. Released objects will remain at their last position in 3D space.
To reset the complete simulation the button "Reset Objects" can be used in the bottom left corner of the 3D view.
Function Blocks¶
The Robot Simulator provides the following function blocks:
Simulator Gripper - Open¶
Opens the simulated gripper attached to the robot flange. If a part is attached to the gripper it will be released.
| Name | Data type | Description | |
|---|---|---|---|
| Inputs | - | ||
| Outputs | Success | Boolean | Indicates the success of the operation. |
Simulator Gripper - Close¶
Closes the simulated gripper attached to the robot flange. If a part is close to the gripper it will be attached.
| Name | Data type | Description | |
|---|---|---|---|
| Inputs | - | ||
| Outputs | Success | Boolean | Indicates the success of the operation. |