Palletizing: Christmas scenario¶
In the following chapter, we will show you how to use the palletizing position producer.
Here you can download the scenario and the finished program.
(1) Create a Palletizing program¶
Video Tutorial¶
Step-by-step Guide¶
- Import the provided christmas scenario in the Scenario Designer.
- Go in the "Programs section" to "Function blocks" and import the function block "Christmas tree ball position producer" (You can download the function block here).
- Change the TCP of your selected gripper (or create a new TCP) to Z:0.22m (all other coordinates remain 0).
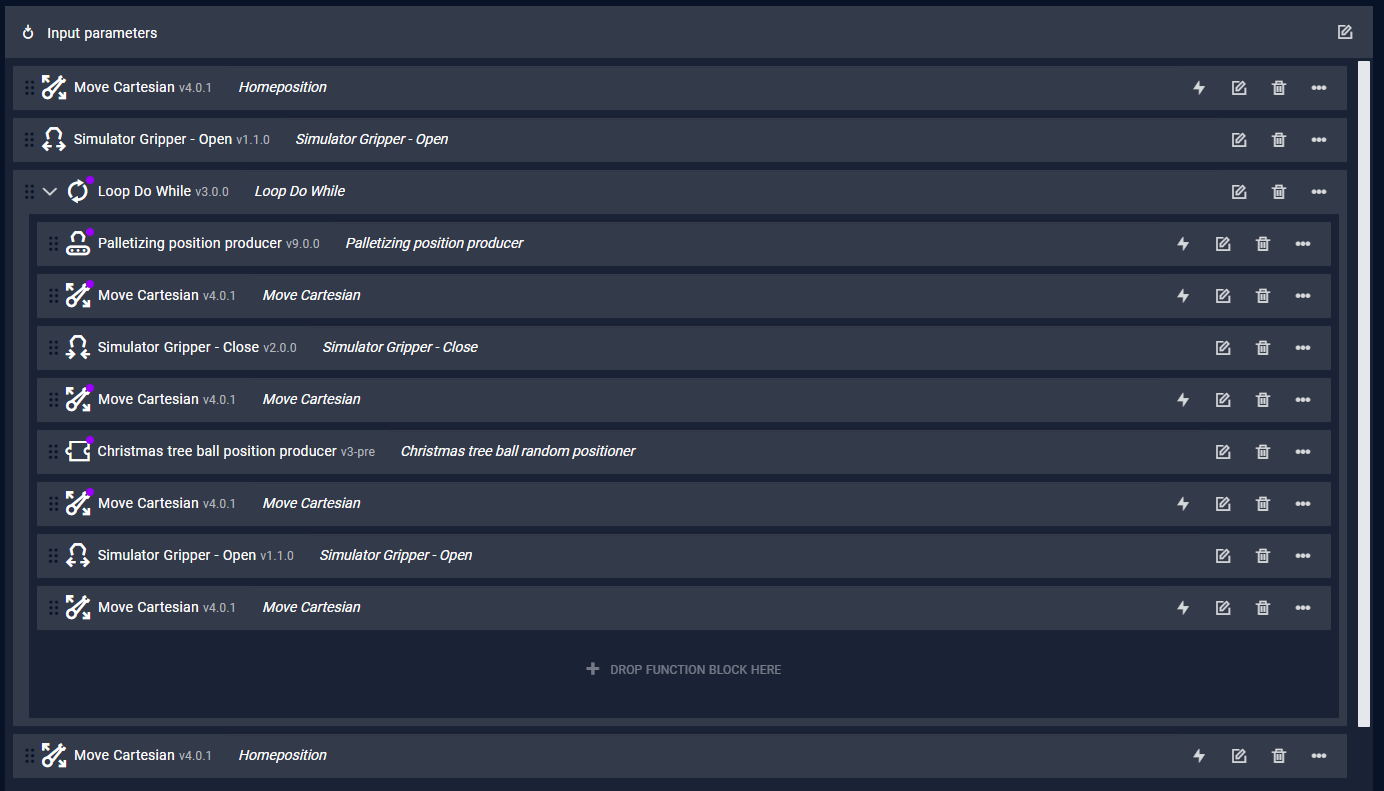
- Go to the "Programs" area and create a new program.
- Drag a
Move Cartesianfunction block into the programme and name it "Homeposition". - Now add
Simulator Gripper - OpenandPalletizing position producerto the program. - Set the parameter settings for the
Palletizing position producerand follow the palletizing wizard.- Choose the regular grid type
- Set the grid to 6 columns and 4 rows
- Set the palletizing dimensions by moving the robot to the defined pallet positions
- Define the two pick positions as described in the wizard.
- Choose the picking sequence.
- Drag another
Move Cartesianfunction block into the program. - Open the parameter settings and click on the link symbol to the right of
Trajectory. - Link the trajectory with the "Approach trajectory" from the Palletizing position producer.
- Save the setting.
- Now add a
Simulator Gripper - Closeand aMove Cartesianblock. - Open the parameters of the
Move Cartesianand link the trajectory to theRetreat trajectoryof the Palletizinng position producer. - Now add the
Christmas tree ball position producerto the program and enter - for the provided scenario - the following values into the parameter settings: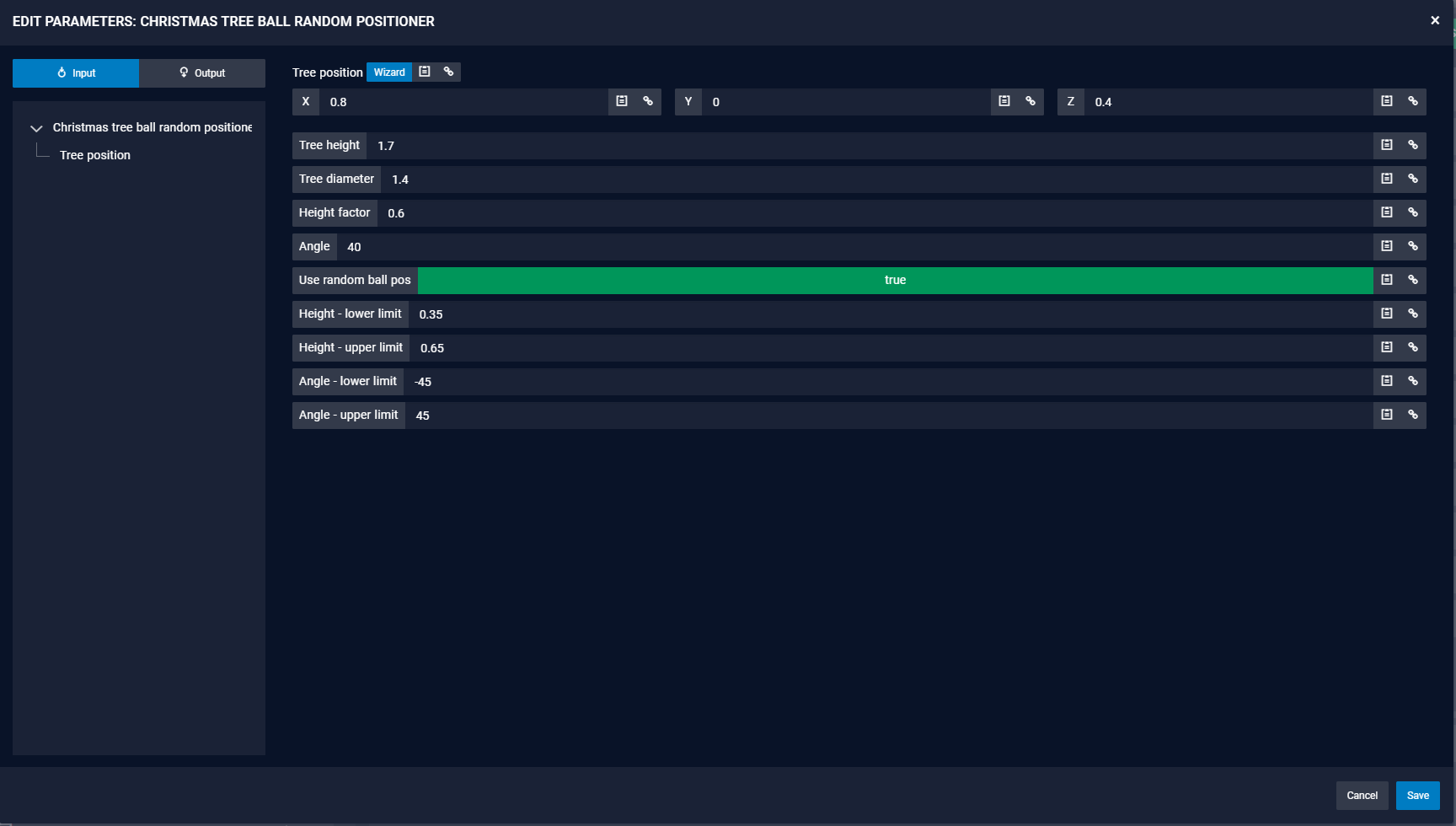
- Drag another
Move Cartesianfunction block into the program. - Create a waypoint in front of the christmas tree balls and one in front of the christmas tree. The coordinates can be the following:
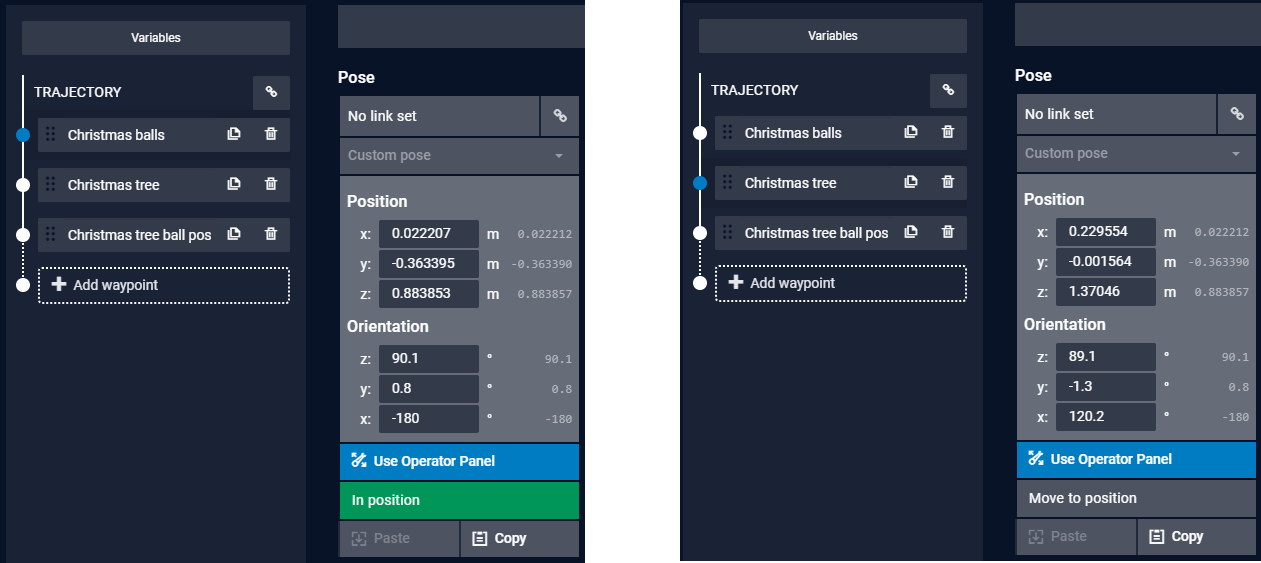
- Create a third waypoint "Christmas tree ball positioner" and link the XYZ positions with the "Christmas tree ball positioner" positions:
- To do this, go to the
Generic parameter editorand click on the third waypoint in the menu on the left. - Link the XYZ coordinates under "Position" with the "Christmas tree ball positioner".
- To do this, go to the
- Add the function block
Simulator Gripper- Open to the programme. - Duplicate the previous
Move Cartesianblock and delete the last waypoint in it. Swap the two remaining waypoints. - Now drag a
Loop do Whilefunction block into the programme and place all function blocks -except the first two- into the loop. - Go into the parameter settings of the loop function block and link the input parameters with the "Palletizing Position Producer".
- Duplicate the first "Homeposition" function block and place it at the end of the programme, outside the loop.
- Done! You can now decorate your Christmas tree with the robot