Epson Driver Usage¶
Requirements
The driver must be installed on the robot controller following the Epson-Controller driver instructions.
Important
- The Controller Digital Outputs pins 8 to 15 should not be assigned to any of the system status output signal, otherwise setting the controller digital IOs will not work.
- You can control the system status output signals and their assignment from : setup menu -> System Configuration -> Controller -> Remote Control -> Outputs.
After the driver is installed in the robot controller, to use the robot with drag&bot you will need to:
- STEP-01: Start the Controller.
- STEP-02: Configure an static IP on the drag&bot IPC in the same range of robot controller (e.g. 192.168.0.10) and connect the IPC to it through ethernet cable.
- STEP-03: Add the corresponding Epson Controller drag&bot component in the Robot System. Configure robot IP and the robot model.
Step 1: Start the controller¶
-
Turn on the Controller. The drag&bot driver will be loaded at the controller startup automatically.
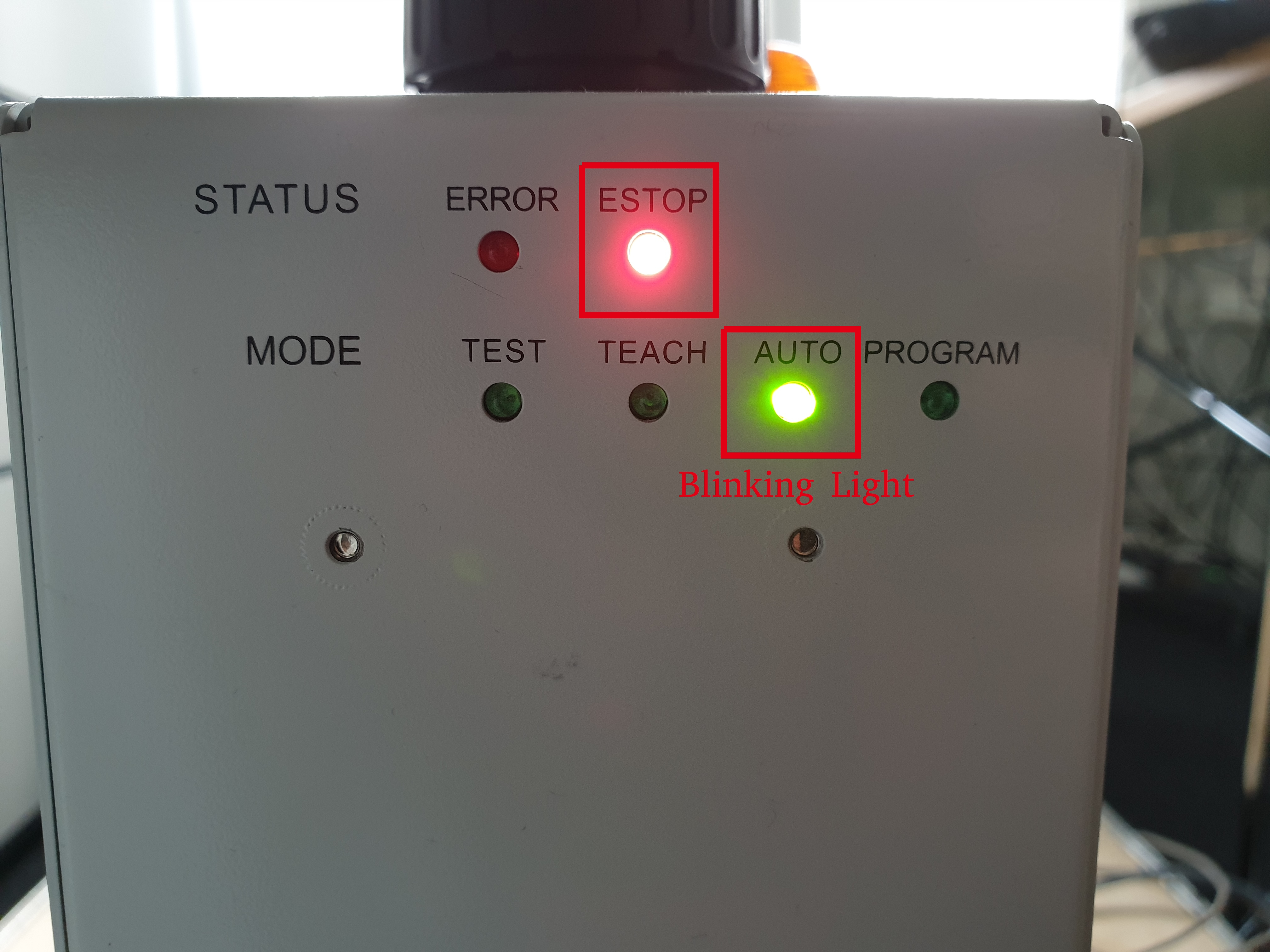
-
Wait until Auto light is the only one blinking. All other lights are off, except ESTOP in case emergency stop button is activated. This means that the controller is booted up and ready.
Step 2: Network connection¶
Connect the drag&bot IPC through ethernet cable to the robot controller. You need to configure a static IP in the same range (e.g. 192.168.0.10) of the robot controller with a mask of 255.255.255.0. More information about network can be found in Network Setup and Robot Network Configuration documentation.
Please refer to your Epson controller manual in order to find your correct controller ethernet port.
Step 3: Robot system configuration¶
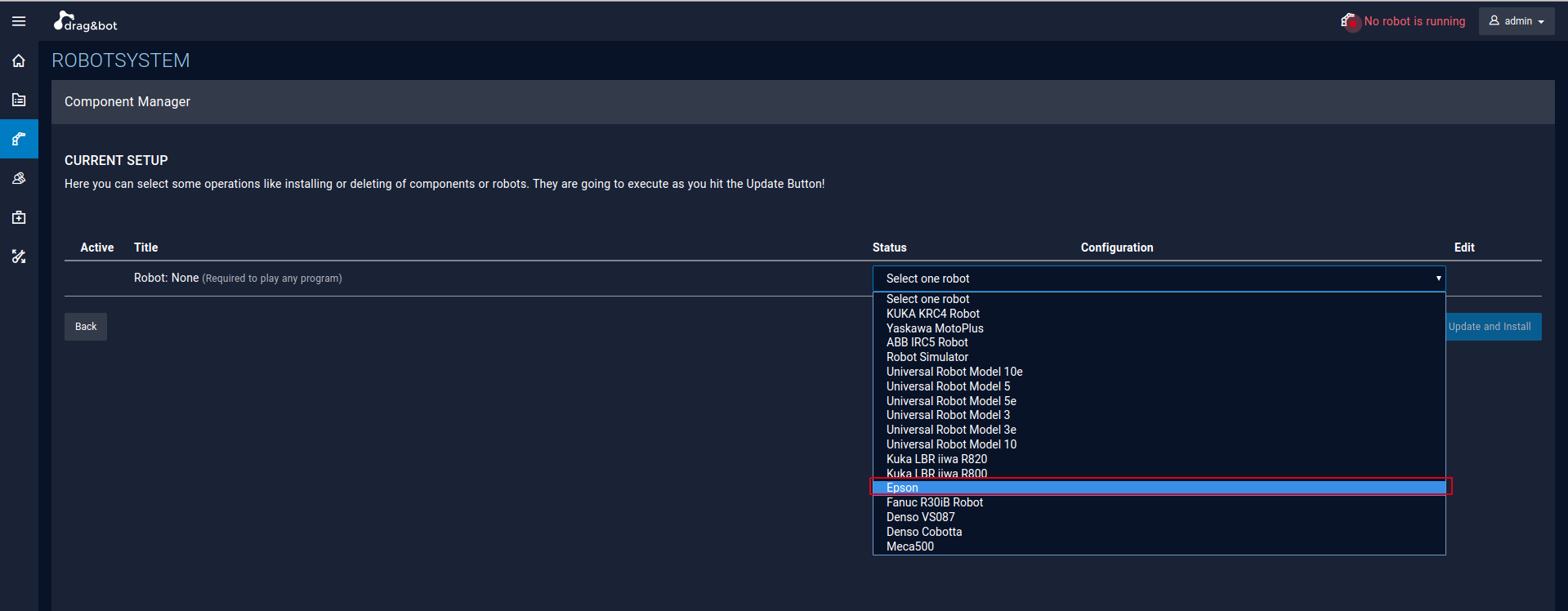
-
Please select Epson from the drop-down menu in the drag&bot Component Manger.
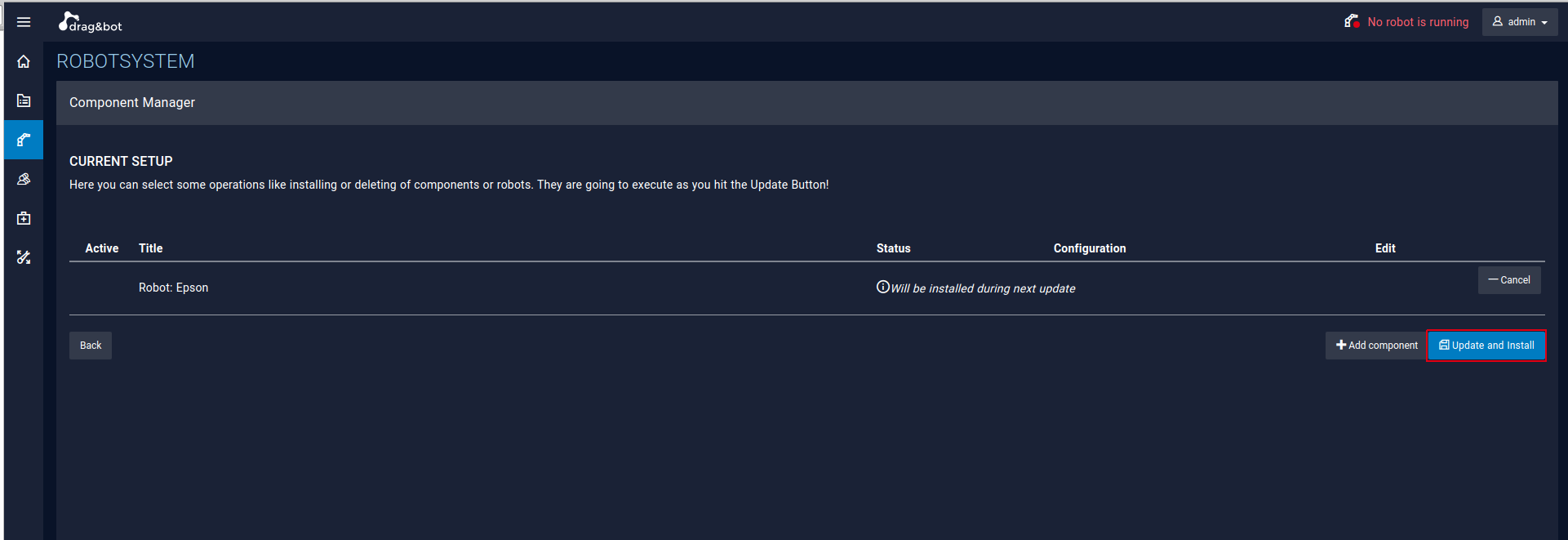
-
Click on Update and Install.
-
Click on the PEN icon to edit the driver configuration.
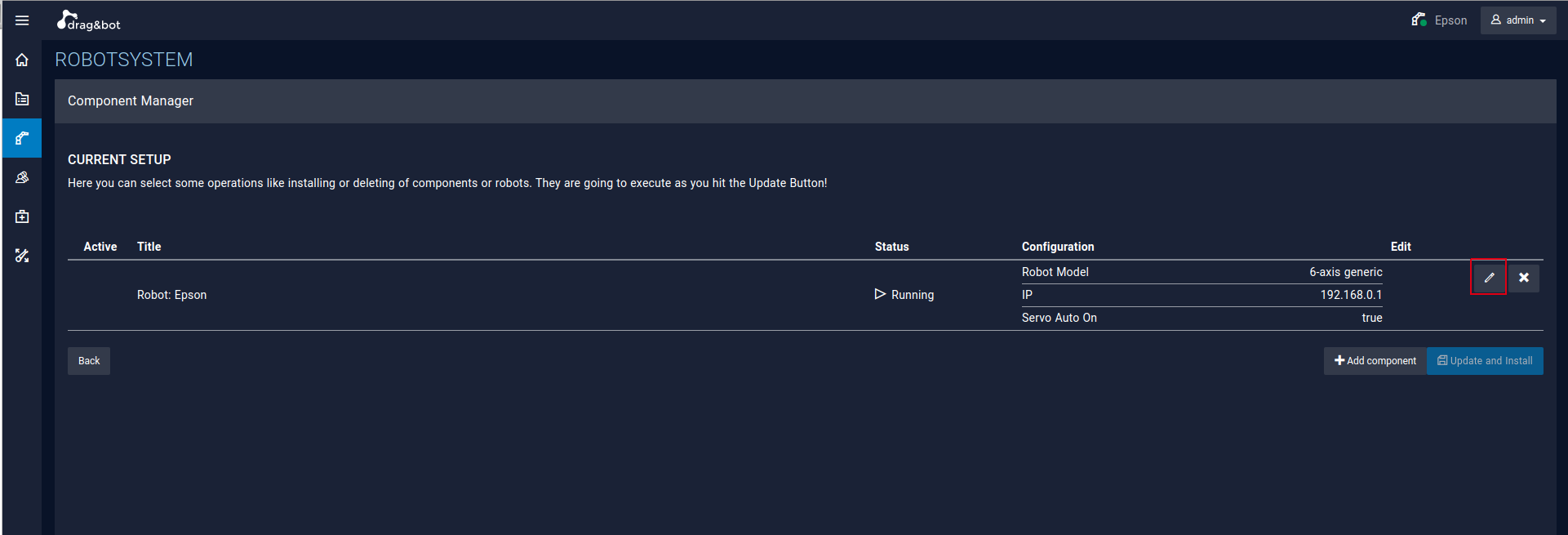
-
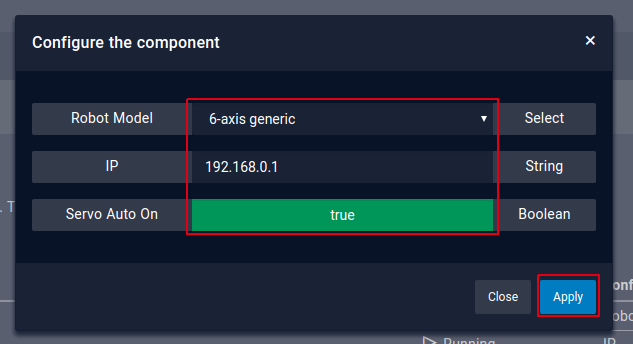
Enter your robot IP address if differs and select your robot model number and activate the Servo auto on, then click Apply. If your robot model number is not shown in the list than just select '6-axis generic' or 'SCARA generic' to set a generic view.
-
If pressed, release the controller emergency button and start using the drag&bot.
Digital Inputs and Outputs¶
The Epson controllers provide several Digital I/Os, which are accessible through drag&bot:
| Controller Ports | Type | drag&bot Pin |
|---|---|---|
| Digital Input 0 to 23 | Digital Input | DI[0] to DI[23] |
| Digital Output 0 to 15 | Digital Output | DO[0] to DO[15] |
To interact with the Digital I/Os using this numbering in your programs use the function blocks
- Digital I/O Device - Get
- Digital I/O Device - Set
- Digital I/O Device - Wait For
as described in the Function Block Library overview.