Zimmer Grippers¶
Information
For more information than described here, please refer to the respective manual of your specific Zimmer gripper.
Device modes¶
A Zimmer gripper is controlled with several device modes, where the most important are described in the following.
| Device Mode | Description |
|---|---|
| 1 | Idle / empty command |
| 2 | Gripper-Reset |
| 3 | Power on motor |
| 5 | Power off motor / Stop gripping movement |
| 10 | Start Homing (just necessary, if the gripper was moved without being powered) |
| 50 | Movement Profile "PositionProfile": The gripper moves with a given velocity to the BasePosition or WorkPosition. |
| 60 | Movement Profile "ForceProfile" for gripping from outside. The gripper moves from the BasePosition to the TeachPosition and grips with a given force. If no workpiece is detected, the gripper continues movement until the WorkPosition is reached. This mode is for stiff workpieces. |
| 65 | Movement Profile "ForceProfile" for gripping from outside. The gripper moves from the BasePosition to the TeachPosition and grips with a given force. If no workpiece is detected, the gripper continues movement until the WorkPosition is reached. This mode is for elastic or flexible workpieces. |
| 70 | Movement Profile "ForceProfile" for gripping from inside. The gripper moves from the WorkPosition to the TeachPosition and grips with a given force. If no workpiece is detected, the gripper continues movement until the BasePosition is reached. This mode is for stiff workpieces. |
| 75 | Movement Profile "ForceProfile" for gripping from inside. The gripper moves from the WorkPosition to the TeachPosition and grips with a given force. If no workpiece is detected, the gripper continues movement until the BasePosition is reached. This mode is for elastic or flexible workpieces. |
Parameters¶
To control a Zimmer gripper several parameters are used. These are listed in the following table:
| Parameter | Unit | Description |
|---|---|---|
| DeviceMode | number | General mode to control the gripper |
| ControlWord | number | Specific action to control the gripper (set by d&b) |
| BasePosition | 100 * mm | A position to control the gripper. |
| WorkPosition | 100 * mm | A position to control the gripper. |
| TeachPosition | 100 * mm | A position to control the gripper, usually the workpiece position. |
| PositionTolerance | 100 * mm | Tolerance for the workpiece position. |
| DriveVelocity | % [0;100] | Velocity for the gripper in travel modes. |
| GripForce | % [0;100] | Force for the gripper in force modes. |
| A specific command might just use a subset of this parameters. |
Movement Profiles¶
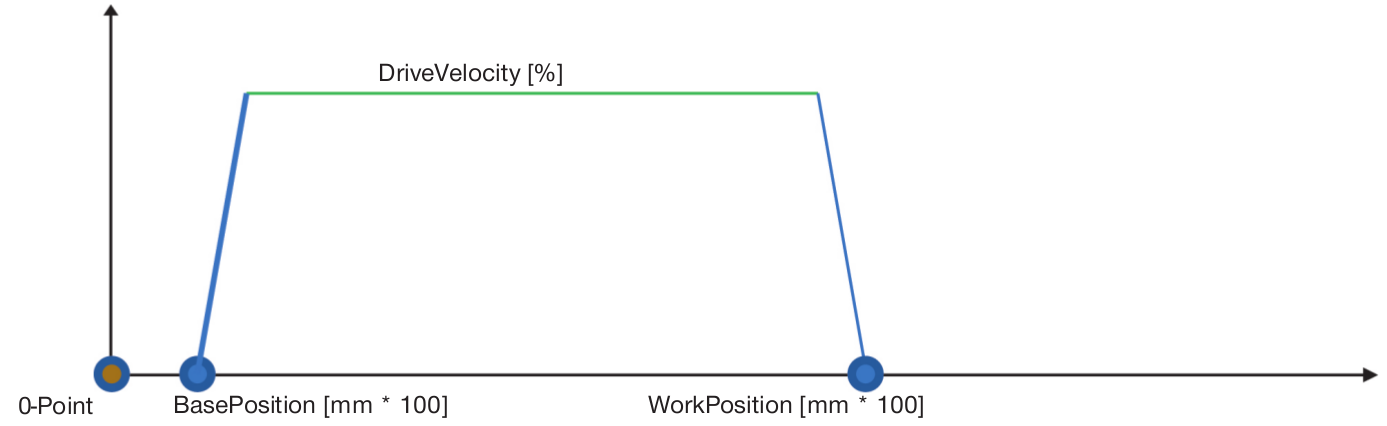
Position Profile¶
The position profile moves the gripper with a given velocity in percent (from 0 to 100) to the Base Position or the Work Position (each given in mm * 100). This is used to translate the gripper to a different position. The mode is not meant for force controlled gripping. In the following image the behavior is shown.
Force Profile¶
The force profile supports several device modes. Starting from an initial position the gripper moves to the TeachPosition, which is the ideal gripping position for the workpiece. If a workpiece is found within the PositionTolerance around the TeachPosition, the gripper applies the given GripForce (in percent from 0 to 100) and returns a success. If no workpiece is found in the PositionTolerance range, the gripper continues until the abort position and returns an error. For different device modes the meaning of initial position and abort position differs as shown in the following table:
| Device Mode | Description | Initial Position | Abort Position | Resulting Position Chain |
|---|---|---|---|---|
| 60 | Gripping from outside for stiff workpieces | BasePosition | WorkPosition | BasePosition < TeachPosition < WorkPosition |
| 65 | Gripping from outside for elastic/flexible workpieces | BasePosition | WorkPosition | BasePosition < TeachPosition < WorkPosition |
| 70 | Gripping from inside for stiff workpieces | WorkPosition | BasePosition | WorkPosition < TeachPosition < BasePosition |
| 75 | Gripping from inside for elastic/flexible workpieces | WorkPosition | BasePosition | WorkPosition < TeachPosition < BasePosition |
In the following image the behavior is shown for gripping from outside.
