ABB Usage¶
Note
This assumes that setting up the IRC5 controller for drag&bot has successfully been finished.
Running a ABB robot with drag&bot¶
- Starting drag&bot can be done in Automatic mode or Manual mode.
- Start the IRC5 controller.
- At the teach pendant you can watch outprints of the controller programs when switching to the outprint view.
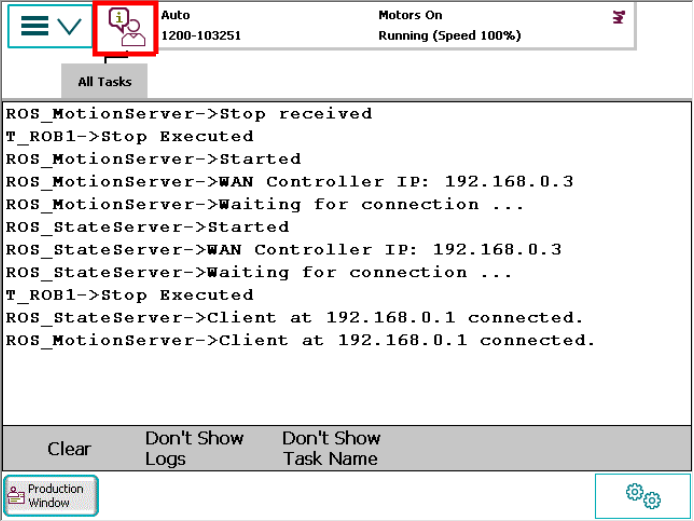
- Start drag&bot with the ABB setup. Configure the controllers WAN IP, displayed in the outprint, in the Component Manager. It is now possible to watch the robot from drag&bot.
- Release the emergency stop buttons at the IRC5 controller and teach pendant.
- In Automatic mode the controller will start the motors and run the teach pendant motion program as soon as the driver connects to the controller.
- In Manual mode the following steps are necessary to enable motion:
- Press and keep pressed the deadman switch of the teach pendant.
- At the tech pendant Production Window press the PP to Main button (PP means program pointer) in the bottom bar and press the hardware Play button at the teach pendant.
- As long as you keep the deadman switch pressed you can move the robot in drag&bot or play programs there.
- Each time you release and press again the deadman switch you have to reset the program pointer and press the play soft button
 .
.
Error Handling¶
- After network connection actions (pulling and plugging ethernet cable, changing network configuration, etc.) the controller should automatically reconnect. If it does not reconnect automatically it is necessary to restart the controller. Especially when the controller program outprint doesn't contain the two lines "DNB_MotionServer->Waiting for connection ..." and "DNB_StateServer->Waiting for connection ..." within the latest lines, a controller restart necessary.
- Unrecoverable Error
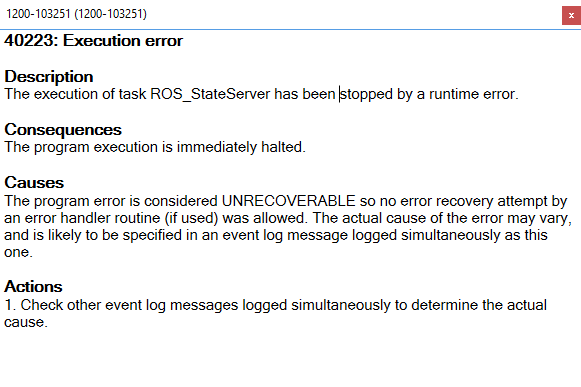
Recommended recovery procedure: Shutdown Driver, Restart Controller, Restart Driver, Start Controller Program