Applikation: Maschine Beladen¶
Zusammenfassung
Das Maschine Beladen Template (Machine Tending Template, MTT) ist eine virtuelle Beispielapplikation um eine Bearbeitungsmaschine aus einem Raster mit Rohteilen zu bestücken und die Fertigteile anschließend wieder zu entnehmen und zurück zu legen. Die Applikation, das Szenario und alle Elemente dienen als Vorlage und können relativ schnell und unkompliziert an eine entsprechende reale Applikation angepasst werden, ohne das die Applikation neu entwickelt werden muss. Dies wird hier beschrieben.
Szenario¶
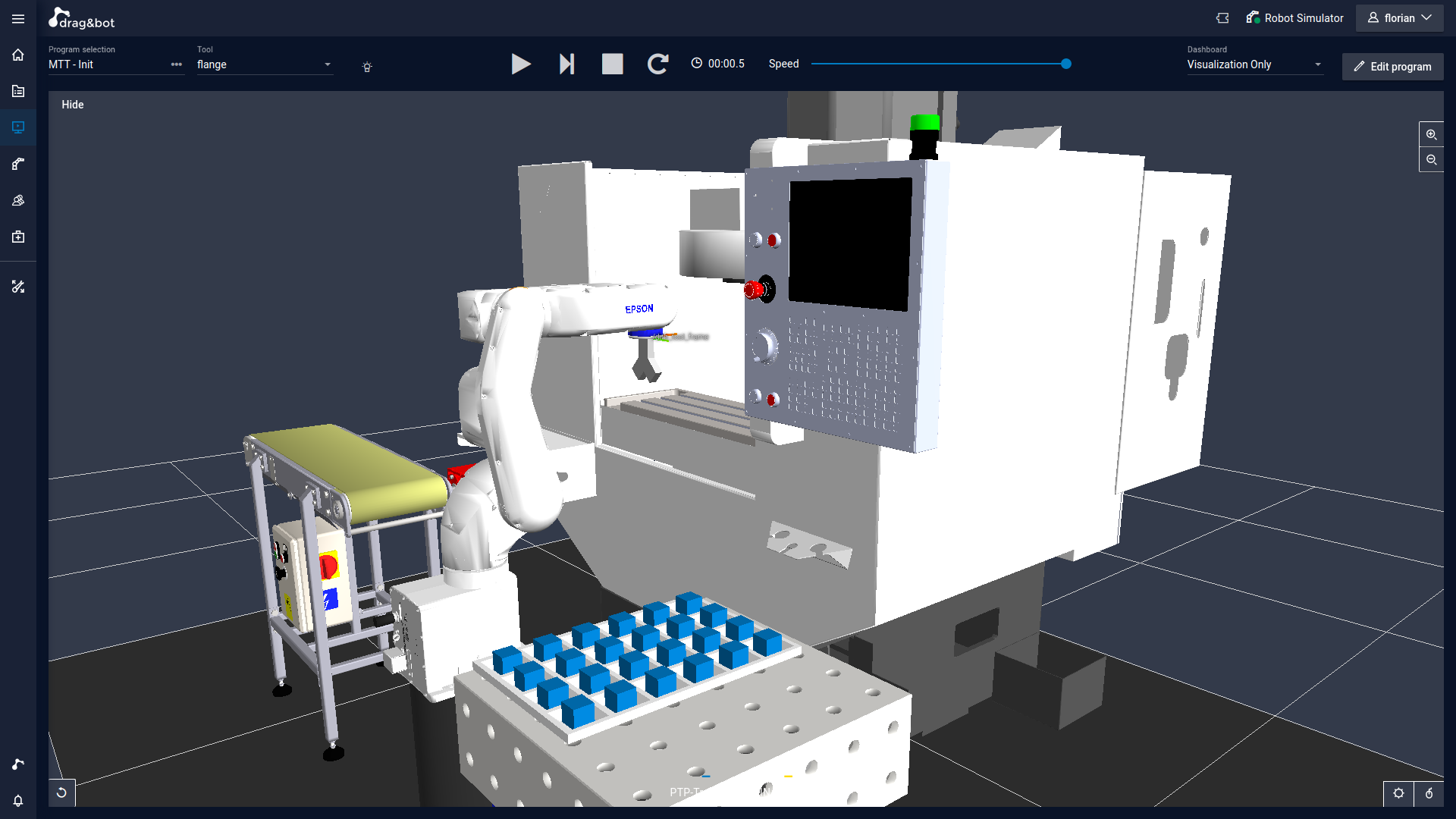
Das Szenario besteht aus einer Bearbeitungsmaschine (ohne Funktion), einem EPSON VT6 Roboter mit Doppelgreifer und einem 4x6 Raster mit 24 Teilen. Die Teile im Raster können mit dem Greifer gegriffen werden um das Bestücken und Entnehmen aus der Maschine zu simulieren.

Roboter¶
Bei dem für das Template verwendeten Roboter handelt es sich um einen EPSON VT6 Roboter. Grundsätzlich ist jedoch jeder beliebige andere Roboter möglich, der den notwendigen Arbeitsraum erreicht. Eventuell müssen Bewegungen, die auf Gelenkwinkeln basieren angepasst werden.
Um den Roboter zu konfigurieren wählen sie im Komponentenmanager als Roboter den Robot Simulator aus und konfigurieren sie als Robot Model den Epson VT6 A901S Roboter. Setzen sie den Parameter Show Simple Gripper auf False.
Greifer¶
Bei dem für das Template verwendeten Doppelgreifer handelt es sich um ein einfaches Ersatzmodell keiner spezifischen Marke. Der Greifer wird als einfaches Objekt im Szenario dargestellt und hat keine Finger, es handelt sich gewissermaßen um einen Doppel-Sauggreifer. Einer der beiden Greifer fungiert als Rohteilgreifer, während der andere als Fertigteilgreifer verwendet wird.
Um die beiden Werkzeugmittelpunkte zu laden, importieren sie die Dateien für Rohteilgreifer und Fertigteilgreifer im Werkzeugmanager:
Programme¶
Das Template enthält vier Programme, wobei diese jeweils wiederum mehrere Unterprogramme enthalten. Importieren sie die vier Programme in der Programmübersicht.
Das Programm MTT - Init muss einmalig ausgeführt werden um notwendige Variablen auf dem Datastore zu initialisieren. Im Anschluss kann die Applikation ausgeführt werden.
Das Programm MTT - Applikation enthält den eigentlichen Programmablauf.
Bei jeder Ausführung wird das Raster kontinuierlich solange nach Rohteilen durchsucht, bis keine weiteren Zellen mit entsprechendem Inhalt mehr gefunden werden. Jedes Rohteil wird mit dem Rohteilgreifer aufgenommen und in die Maschine zur Bearbeitung eingelegt. Danach wird das Fertigteil aus der Maschine entnommen während direkt im Anschluss direkt das nächste Rohteil eingelegt wird. Das entnommene Fertigteil wird zurück in das Raster gelegt. Die Zustände der Teile sind dabei komplett persistent, d.h. das Programm kann an jeder Stelle unterbrochen werden und später mit dem gleichen Teilezustand wieder fortgesetzt werden. Der genaue Ablauf wird im Abschnitt Aufbau der Applikation ausführlich Schritt für Schritt erläutert.
Das Programm MTT - Autogrundstellung bewegt den Roboter von jeder Position in seinem Arbeitsbereich auf kollisionsfreiem Weg zurück in die Grundstellung. Dabei werden kritische Bereiche, wie Greifer im Raster oder Roboter in der Maschine berücksichtigt. Das Programm ist als Schnellzugriffsprogramm ausgelegt.
Das Programm MTT - Rohteileraster Reset setzt alle Zustände der Teile und Positionen der beweglichen Objekte im Szenario zurück. Das Programm ist als Schnellzugriffsprogramm ausgelegt.
Dashboard¶
Nachdem die Initialisierung durch das Programm MTT - Init durchgeführt wurde und die beiden Programme MTT - Autogrundstellung und MTT - Rohteileraster Reset als Schnellzugriffsprogramme markiert wurden, kann im Operator Cockpit ein neues Dashboard für die Applikation angelegt werden:
In diesem Dashboard Maschine Beladen bietet es sich an die folgenden Widgets einzurichten:
- Schnellzugriff: Programme für einen schnellen Zugriff auf die Programme MTT - Autogrundstellung und MTT - Rohteileraster Reset.
- KPIs und Interaktion für die Gruppe basic um den Status der Teile in den Greifern und in der Maschine überwachen und evtl. anpassen zu können. Des weiteren erlaubt das Panel den Zyklusstop, der den Roboter kontrolliert nach Abschluss des aktuell laufenden Zyklus in die Grundstellung fährt.
- Rasterverwaltung um den Status der Teile im Raster überwachen und evtl. anpassen zu können.
Aufbau der Applikation¶
In der Maschine Beladen Applikation wird zunächst im Unterprogramm Prüfe Startposition überprüft, ob der Roboter sich in der Grundstellung befindet. Ist dies nicht der Fall bricht das Programm mit einer entsprechenden Meldung ab.
Im Anschluss werden das Flag für den Zyklusstop zurückgesetzt und die Parameter des Rasters initialisiert. Danach betritt der Roboter eine Schleife die er so lange wiederholt, bis keine Rohteile mehr im Raster vorhanden sind und beide Greifer und die Maschine leer sind.
In jedem Schleifendurchlauf werden die folgenden Fälle der Reihe nach überprüft und evtl. durchgeführt:
- Noch Rohteile im Raster und kein Teil im Rohteilgreifer: Der Roboter fährt zum Raster und nimmt mit dem Rohteilgreifer das nächste Teil auf. Die Zelle wird im Anschluss auf den Zustand leer gesetzt, während der Rohteilgreifer als belegt markiert wird.
- Wenn Teil in Maschine und kein Teil im Fertigteilgreifer: Der Roboter fährt zur Maschine und entnimmt das dort vorhandene Fertigteil. Der Status für Maschine und Fertigteilgreifer wird im Anschluss entsprechend angepasst.
- Wenn Teil im Rohteilgreifer und kein Teil in Maschine: Der Roboter fährt zur Maschine und platziert das Teil im Rohteilgreifer für die Bearbeitung. Der Status für Maschine und Rohteilgreifer wird im Anschluss entsprechend angepasst.
- Wenn Teil im Fertigteilgreifer: Der Roboter fährt zum Raster und platziert das Fertigteil in der nächsten freien Zelle. Die Zelle wird entsprechend als mit einem Fertigteil belegt markiert. Entsprechend wird der Fertigteilgreifer als leer markiert. Kann kein freier Platz für ein Fertigteil gefunden werden, so fährt der Roboter in Grundstellung und bricht das Programm mit einer entsprechenden Fehlermeldung ab. Dies ist jedoch ein Zustand, der nur dann vorkommen sollte, wenn zum Programmstart alle Zellen mit Rohteilen belegt sind und sich Teile in den Greifern oder der Maschine befinden.
- Zuletzt wird überprüft, ob die Voraussetzungen für einen weiteren Schleifendurchlauf erfüllt sind. Die Schleife wird fortgeführt, wenn kein Zyklusstop angefragt wurde und entweder weitere Rohteile im Raster vorhanden sind oder ein Fertigteil in der Maschine vorhanden ist.
Wird die Schleife abgebrochen, weil keine weiteren Roh- oder Fertigteile mehr zu verarbeiten sind, oder weil der Zyklusstop aktiviert wurde, so fährt der Roboter zuletzt in die Grundstellung.