Halcon Vision Installation and Usage¶
This tutorial explains how to connect drag&bot with a Halcon Vision system.
Preconditions and relevant information¶
Requirements
- Halcon software must be installed on the same drag&bot PC or on a different PC in the same network of the drag&bot PC. The installation manual can be located on the Halcon website
- A Linux Halcon installation is assumed in this tutorial.
- Download the drag&bot Halcon driver from here: DOWNLOAD
 .
.
Note
- This driver was created and tested using Halcon HDevelop version 19.11 Progress.
Importing and starting the hdevelop driver¶
- Open the Halcon HDevelop by typing hdevelop in the Linux terminal
-
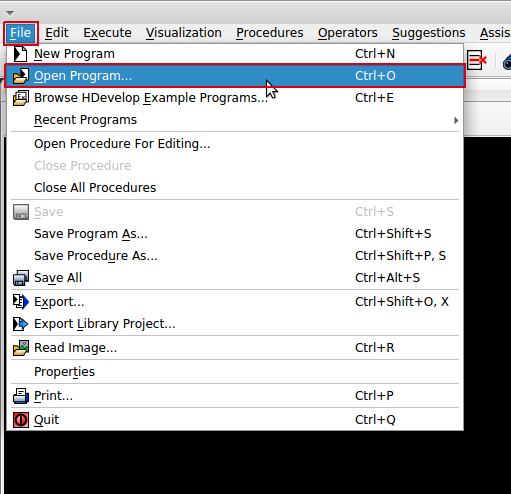
From File Menu Select Open program.
-
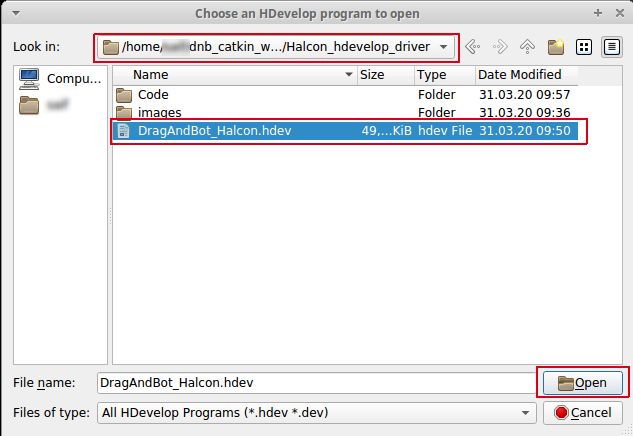
Navigate to the drag&bot halcon driver location on your PC, select it and click Open.
-
Click on the Reset Program Execution icon. Then click on Run icon. The driver is ready now and waiting for the drag&bot Halcon d&b Component to be running.

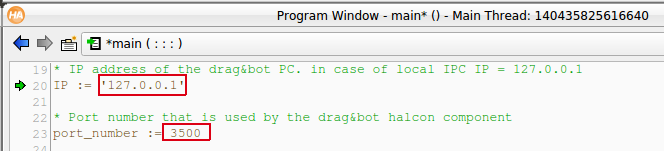
Halcon IP and Port number¶
The Halcon driver is pre-configured to work in the same PC that drag&bot is running. If you want to run it on a different PC please change the value of the IP variable to the IP address of the drag&bot's PC. This is applicable also for the port_number.
Starting Halcon component at drag&bot¶
-
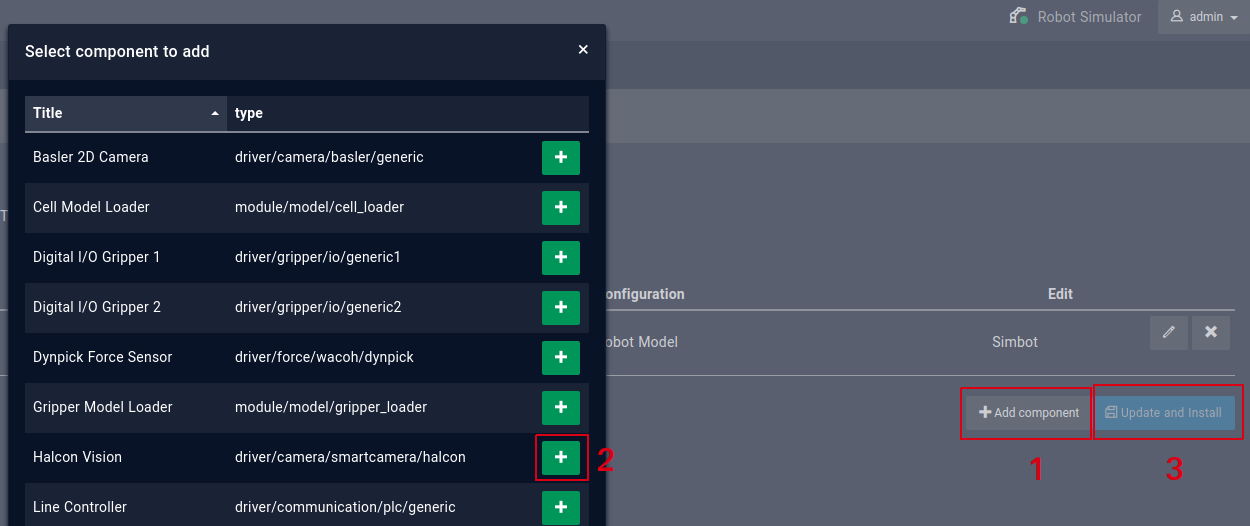
Click on Add component, Click on the + sign beside the Halcon Vision, then click on Update and install. Wait a bit till the component is loaded.
-
Click on the PEN icon to edit the driver configuration.

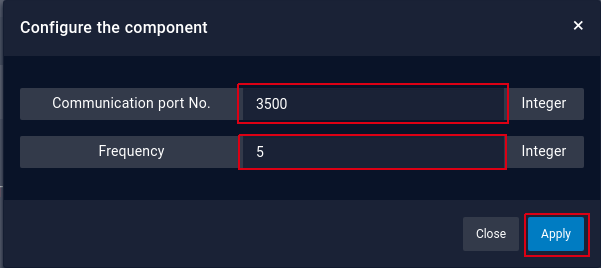
-
Enter the communication port number if changed at the Halcon software side and enter the desired auto image publisher frequency, then click Apply.
-
Once the Halcon component status is shown as Running you can start using the drga&bot Halcon programs.

Note
- Auto Image publisher frequency can't be guarenteed because it's depends on many factors such as the image size, current load on the PC CPU, network speed, etc.
Function Blocks¶
Halcon - Get Text Object Function Block¶
This function block triggers a program and retreives a text from the program (e.g. extracted from QR/bar code).
| Name | Datatype | Description | |
|---|---|---|---|
| Inputs | Program ID | Integer | The program/procedure number to be triggered at the Halcon side |
| Timeout | float | Timeout in seconds in case of no response from Halcon side | |
| Outputs | success | Boolean | The execution success flag |
| error msg | String | The error message in case of an error | |
| detected text | String | The detected text from the Halcon program |
Halcon - Get Pose Function Block¶
This function block is using to trigger a program which returns a robot position. This can be used for example to detect a 2D or 3D coordinate. It includes also the transformation in case that the camera is extrinsically calibrated in drag&bot (only for 2D detection available).
| Name | Datatype | Description | |
|---|---|---|---|
| Inputs | Program Type | String | Select whether to trigger a 2D or 3D coordinate program |
| Program ID | Integer | The program/procedure number to be triggered at the Halcon side | |
| Timeout | float | Timeout in seconds in case of no response from Halcon side | |
| Transformation | String | Use transformation in case that the Camera is extrinsically calibrated in drag&bot (only for 2D detection) | |
| Calibration Name | String | The camera calibration file name in case of using transformation (only for 2D detection) | |
| Outputs | success | Boolean | The execution success flag |
| No. Of detected objects | Integer | Return the number of detected objects | |
| Position | POSE | Return the position of the first detected object |
Halcon - Trigger single frame image Function Block¶
This function block gets and publishes a single frame image.
| Name | Datatype | Description | |
|---|---|---|---|
| Outputs | success | Boolean | The execution success flag |
Halcon - Set Automatic Image Publisher Function Block¶
This function block can activate/deactivate the Halcon automatic image publisher.
| Name | Datatype | Description | |
|---|---|---|---|
| Inputs | Activate | String | Activate/deactivate the Halcon automatic image publisher |
| Outputs | success | Boolean | The execution success flag |
Note
- Auto Image publisher frequency depends on the selected frequency in the drag&bot Halcon component.
- Auto Image publisher of big size picture or with higher frequency can affect the driver performance.
- Auto Image publisher frequency can't be guaranteed and it will be depends on many factors such as the image size, current load on the PC CPU, network speed, etc.