Maschine-Beladen-Programm mit Zurücklegen¶
Im folgenden Kapitel lernen Sie verschiedene, aufeinander aufbauende Programme für das Beladen von Maschinen:
- Maschine-Beladen-Programm mit Raster,
- Maschine-Beladen-Programm mit Zurücklegen,
- Maschine-Beladen-Programm mit Fehlerbehandlung,
- Maschine-Beladen-Programm mit Doppelgreifer,
- Maschine-Beladen-Programm mit mehreren Rastern
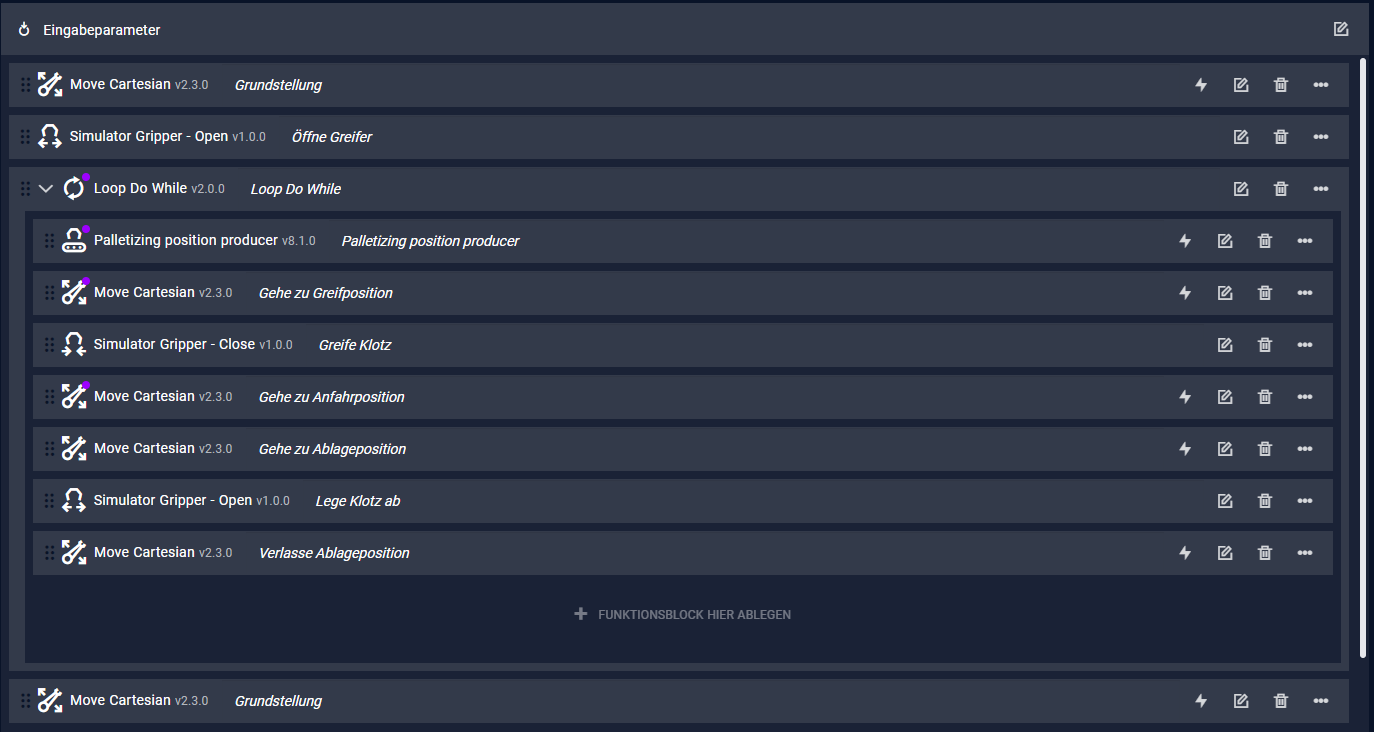
(2) Maschine-Beladen-Programm mit Zurücklegen¶
Schritt-für-Schritt Anleitung¶
- Gehen Sie in den Bereich "Programme".
- Klicken Sie auf
Neues Programmund benennen Sie zunächst das Programm. - Ziehen Sie einen
Move CartesianFunktionsblock in das Programm und benennen Sie diesen als "Grundstellung". - Parametrisieren Sie in diesem Funktionsblock die gewünschte Ausgangsposition mithilfe des Trajectory Wizards.
- Ziehen Sie den Funktionsblock
Simulator Gripper - Openin das Programm. - Fügen Sie nun den Block
Palletizing position producerhinzu und durchlaufen Sie die angezeigten Schritte: a) Wählen Sie die Art des Rasters. b) Legen Sie die Reihen-und Spaltenanzahl fest. c) Definieren Sie die Greifpunkte der angezeigten Zellecken mit dem Trajecotry Wizard, indem Sie aufSetklicken. Im Trajectory Wizard können Sie die Funktion "Quick Access" nutzen, um direkt zu den Greifpunkten der entsprechenden Zellen zu gelangen. d) Setzen Sie nun den Anfahr- und Greifpunkt für die obere rechte Zelle des Rasters. e) Im letzten Schritt wählen Sie nun die gewünschte Sequenz, in der die Werkstücke aufgegriffen werden sollen. - Ziehen Sie einen weiteren
Move CartesianFunktionsblock in das Programm und verlinken Sie die "Approach trajectory". - Klicken Sie hierfür im "Trajectory Wizard" auf das "Link" Icon auf der linken Seite neben dem Wort "Trajectory". Wählen Sie die "Approach Trajectory" unter dem Punkt "Palletizing producer".
- Speichern Sie die Parameter und fügen Sie einen
Simulator Gripper - CloseBlock hinzu. - Wiederholen Sie Schritt 6 und 7, aber verlinken Sie diese Mal die "Retreat trajectory".
- Fügen Sie nun einen
Move CartesianBlock hinzu und parametrisieren jeweils einen Wegpunkt vor der Maschine und in der Maschine. - Am einfachsten lässt sich die Punkte über den Trajectory Wizard und den "Quick Access" Reiter erstellen. Wählen Sie jeweils den "PreMachine" und "InMachine" Button.
- Fügen Sie einen
Simulator Gripper - OpenBlock hinzu. - Duplizieren Sie den vorherigen
Move CartesianBlock und tauschen Sie die beiden Wegpunkte, sodass der Roboter nun von der Position in der Maschine vor die Maschine fährt. - Fügen Sie einen
Loop Do WhileBlock hinzu und ziehen Sie mit Ausnahme der ersten zwei Funktionsblöcke alle bisherigen Blöcke in das Loop Programm. - Klicken Sie beim
Loop Do WhileBlock auf "Paramter setzen" und verlinke Sie den Input Parameter mit dem "Palletizing position producer". - Duplizieren Sie den ersten Block "Grundstellung" und positionieren Sie ihn als letzten Schritt, jedoch außerhalb des Loop Blocks.
- Fertig! Sie haben soeben Ihr erstes Maschine-Beladen Programm erstellt.