Universal Robots Free Drive Mode¶
Information
This feature is available starting with drag&bot bundle version 3.4.0.
Disclaimer
Drag&bot does not hold any responsibility or liability for any injuries, damages, or losses that may result from the use of this functionality. Users assume full responsibility and risk for any harm or damage that may occur. By using this functionality, you acknowledge that you do so at your own risk.
Important
The description below does not consider the safety system. It is the responsibility of the final user to redesign and implement the activation and deactivation of this functionality based on their own risk assessment and safety system design
Universal Robot Controller Configuration:¶
To configure a universal robot controller for the free drive feature, perform the following steps in the teach pendant.
The description below is based on the universal robot e-series.
- Switch to local mode on the UR controller.
- Go to the Program tab.
- Add the Wait function block and adjust its duration to 0.01 seconds.
- Add the Set Digital Output function block and select the digital output pin number that you want to use, by default drag&bot use pin no. 0. Select to set it to a high level.
- Add the Script function block and type in the script freedrive_mode().
- Add the Wait function block and select Wait for and enter the script digital_out[0]≟ False. Change the DO pin number if you used a different pin.
- Add the Script function block and type in the script end_freedrive_mode().
- Add the Wait function block and adjust its duration to 0.01 seconds.
- The final program should be the same as the picture
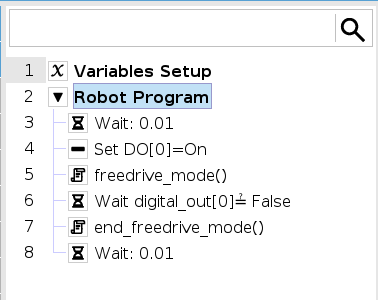 .
. - Select the Save Program As ... in the upper bar.
- Enter the program name "DNB-FreeDrive" (without .urp ending).
- Press the Save button.
Drag&bot Configuration:¶
- Open drag&bot component manger and add your universal robot model. Adjust the digital output number for free drive that has been configured in the universal robot controller.
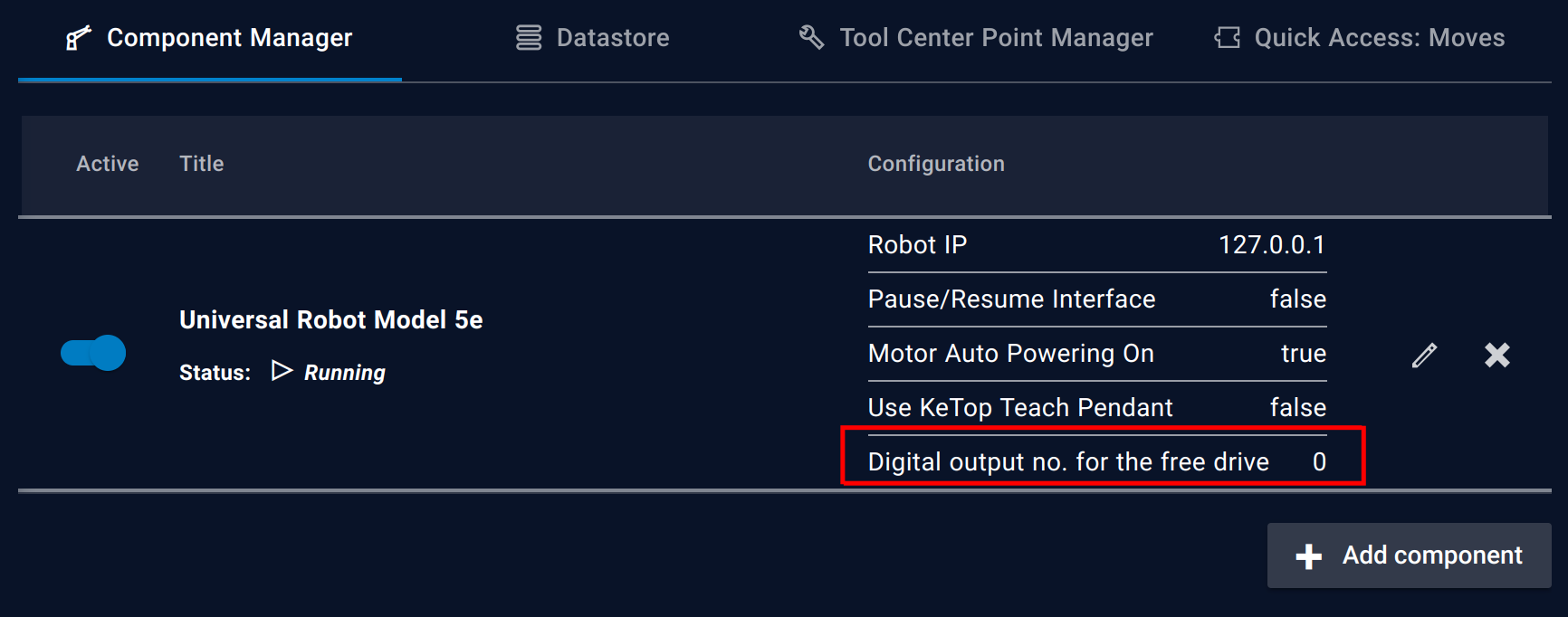 .
. - You can activate/deactivate the free drive mode from the Operator Panel , open the I/O , then under the Robot tab select Free Drive (FD), now you can activate/deactivate the free drive mode using the Free Drive 0 IO.
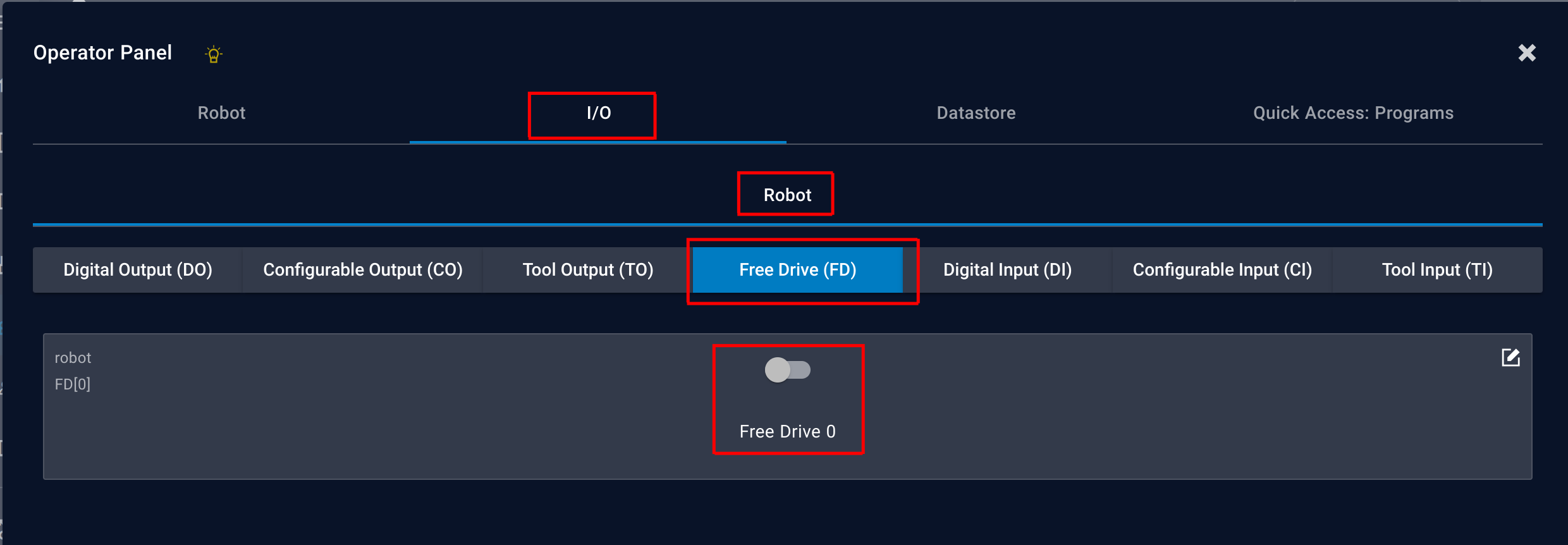 .
.