Installation of drag&bot Runtime¶
Prerequisites
- Industrial PC with Xubuntu 16.04.x version already installed.
- Internet connection is configured including proxy configuration if necessary.
- Administrator (sudo) rights of the computer.
Download and install¶
- Online access to the drag&bot Download Area will be provided with your purchase.
- Go to the site to download the latest drag&bot Runtime.
- Open the downloaded package by right clicking it and press Extract Here
- Open the extracted folder.
- Right click and select Open Terminal Here
- Now type
./install.shto install the drag&bot Runtime. - Close the Terminal.
- Continue to license activation section.
Note
Now you can start the drag&bot Runtime from your desktop by double clicking the shortcut icon. You can also start it by opening the terminal and executing dnb-runtime.
License activation¶
- Start the drag&bot Runtime.
- Type the licence number which was provided to you by E-Mail.
- Click on install.
- The installation will take between 5-10 minutes.
- After the installation is ready, drag&bot will start automatically.
Reinstallation¶
- Follow the steps for downloading and installing from step 1 to 5.
- Now type
./install.sh -rto reinstall the drag&bot Runtime. - Close the Terminal.
Uninstallation¶
- Follow the steps for downloading and installing from step 1 to 5.
- Now type
./install.sh -uto uninstall the drag&bot Runtime. - Close the Terminal.
Functionality¶
Overview:
- Start and stop the robot system runtime system for a robot cell.
- Update the full runtime bundle package.
- Update of the launcher itself for deployment of the bundle.
- Rollback of updates
- Open simple Runview for execution of drag&bot programs
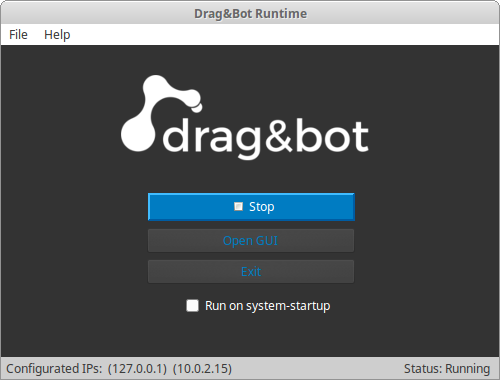
The launcher GUI shown in the image above is a tool to start and stop the drag&bot runtime. The runtime is needed to execute drag&bot programs on a robot system. Every robot is controlled by a single runtime instance like shown in the architecture image below.

One drag&bot Studio is connected to one or many runtime instances. This way it is possible to deploy the same program on several robotsystems.